基于ARM的智能小车设计:无线遥控和激光循迹技术
版权申诉
3 浏览量
更新于2024-06-24
收藏 497KB DOC 举报
基于ARM的无线遥控和激光循迹小车
本文档总结了基于ARM的无线遥控和激光循迹小车的设计和开发过程,涵盖了硬件设计、软件设计和调试等方面的知识点。
硬件设计
* 主控芯片及接口电路:ARM处理器系列,包括ARM7TDMI处理器和LPC2138处理器。
* 基于ARM2103遥控器的硬件设计:使用ARM2103作为遥控器的核心控制平台,实现无线电发送和接收信号。
* 激光传感器和金属探测器的应用:使用FS2-60激光传感器和LJ12A3-4-Z/BX金属探测器,实现小车的自动寻迹功能。
软件设计
* 基于ARM2103无线电发送模块程序的调试:使用ARM2103作为无线电发送模块,实现小车的无线遥控功能。
* 基于ARM2103无线电接收模块程序的调试:使用ARM2103作为无线电接收模块,实现小车的无线电接收功能。
* 无线电&激光寻迹模式选择程序:实现小车的自动寻迹功能,通过ARM2138核心控制平台控制小车的运行。
调试
* PID控制理论概述:介绍PID控制理论的基本概念和应用。
* PID控制主程序:实现小车的PID控制,确保小车的稳定运行。
其他
* 课程设计概述:介绍基于ARM的无线遥控和激光循迹小车的设计和开发过程。
* stage性总结:总结小车的设计和开发过程,包括硬件设计、软件设计和调试等方面的内容。
知识点总结:
* ARM处理器系列的应用
* 基于ARM的硬件设计和软件设计
* 无线电发送和接收模块的设计和实现
* 激光传感器和金属探测器的应用
* PID控制理论和应用
* 小车的自动寻迹功能实现
通过本文档,读者可以了解基于ARM的无线遥控和激光循迹小车的设计和开发过程,掌握相关的硬件设计、软件设计和调试等方面的知识点。

图 2–6 系统复位电路
系统时钟电路
考虑到串口通信时的波特率能够正确的设定,本系统选用 11.0592MHz 外部晶振是为了使用
PLL 和 ISP 下载功能。原理图如图 3–1 所示。
图 2–1 系统时钟电路
LPC2138 的 RTC 需要独立的时钟源,时钟频率为 32.768KHz,电路如图 3–
所示。
图 2–8 RTC 时钟电路
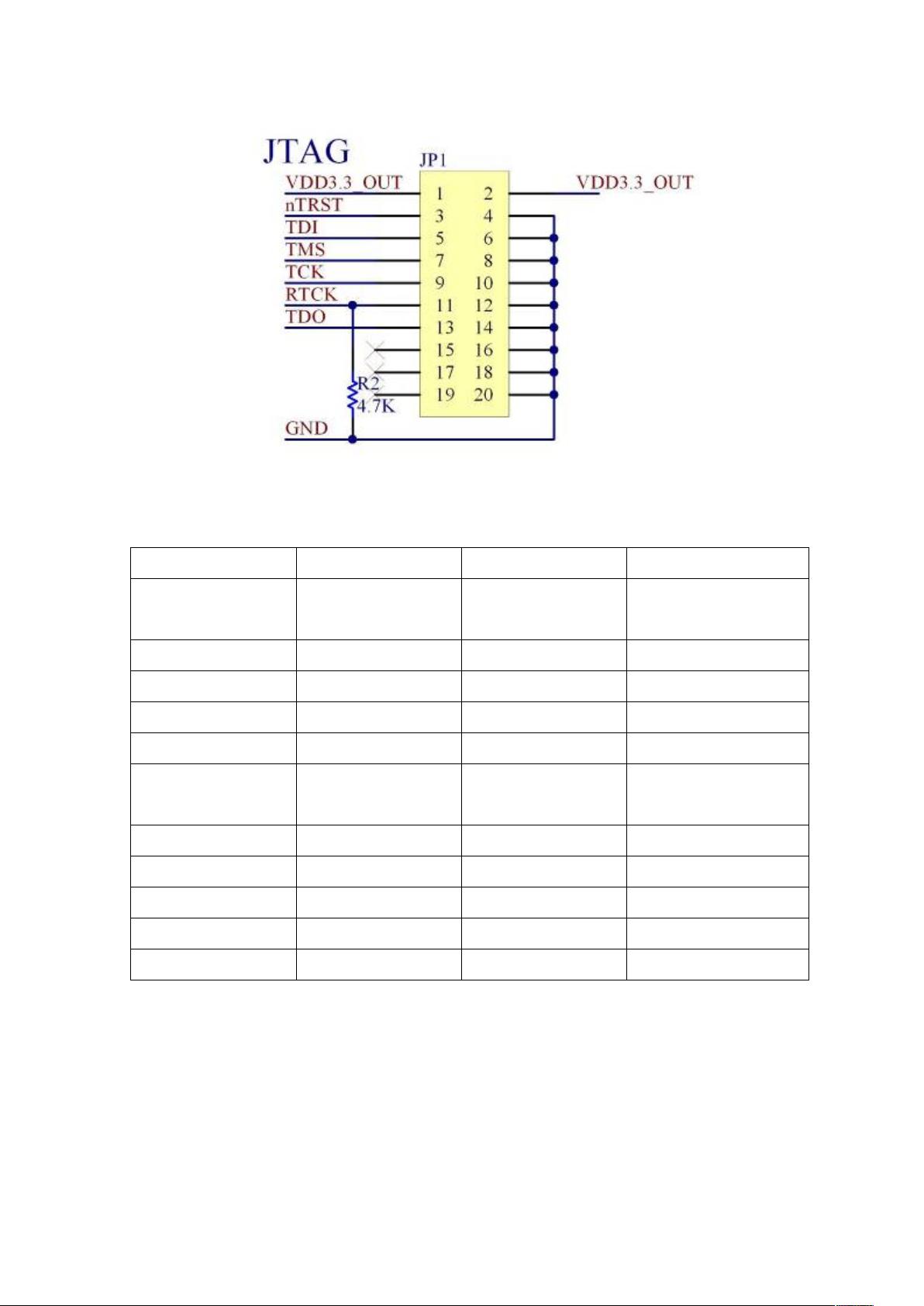
JTAG 调试下载程序接口电路
ARM 公司 ARM7 内核采用了 JATG 联盟提供的标准 20 脚 JTAG 仿真调试接口。RTCK 引脚接一个
4.7K 下拉电阻,使系统复位后 LPC2138 内部 JTAG 接口使能,直接进入 JTAG 调试。原理图如图
3–所示。
剩余35页未读,继续阅读
2013-01-14 上传
2021-09-24 上传
2022-07-04 上传
2023-07-07 上传
2021-12-18 上传
2023-07-08 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







