"坐标变换与相机参数:概念介绍、四种坐标、坐标转换关系、相机标定、投影矩阵M"
需积分: 0 138 浏览量
更新于2023-11-22
收藏 1.08MB PPTX 举报
本文主要介绍了坐标变换过程与相机参数的相关概念和关系。文章首先介绍了针孔模型,描述了其将三维世界中的坐标点映射到二维图像平面的过程,以及焦距f和中心投影的概念。接着介绍了四种坐标系,分别是世界坐标系、相机坐标系、像素坐标系和图像坐标系。 其次讨论了坐标变换的过程,包括世界坐标到相机坐标的转换,相机坐标到图像坐标的转换,以及图像坐标到像素坐标的转换。在介绍世界坐标到相机坐标的转换时,详细讨论了外参矩阵的组成和描述。然后讨论了相机坐标到图像坐标的转换过程,说明了X轴和x轴平行,Y轴和y轴平行,Z轴垂直影像平面且朝向平面。接着介绍了图像坐标到像素坐标的转换,详细描述了像素坐标系和图像坐标系的定义和关系。最后讨论了内参矩阵K的描述和作用,以及投影矩阵M的相关概念。整篇文章从坐标变换过程和相机参数的角度详细介绍了相关的概念和关系,对于了解相机成像的几何模型和相机参数的求解过程有很好的参考价值。
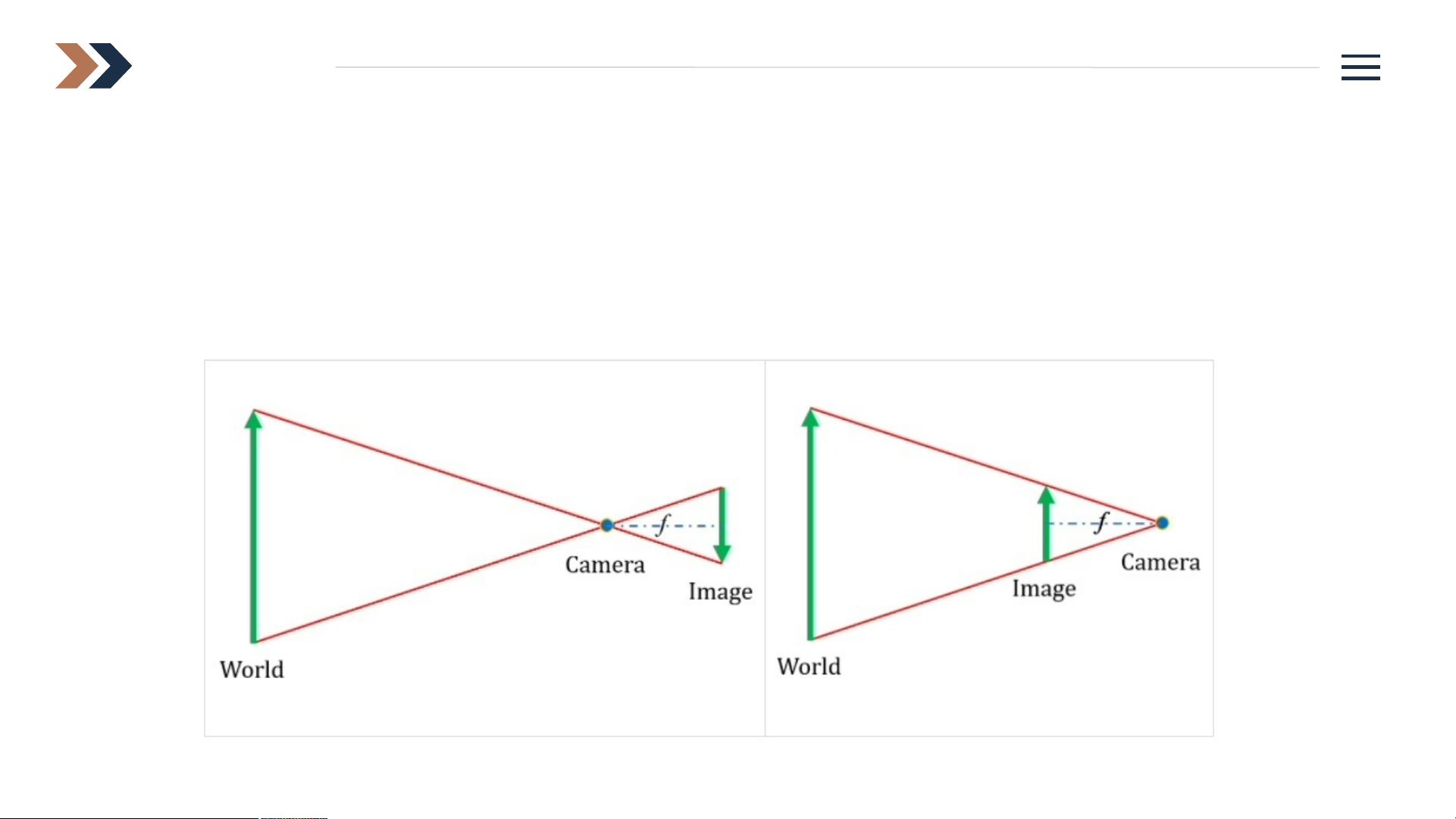
针孔模型
用简单的线条来绘制这样的关系,相机中心到成像平面之间的距离我们称之为焦距f。
现实世界的任一点、其在成像平面上的投影点、相机中心在一条直线上,这种特征称为
中心投影或者透视投影。
剩余18页未读,继续阅读
322 浏览量
2021-11-18 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
206 浏览量
203 浏览量

Silkage.xyc
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Go语言编写的AWS新闻获取程序新特性发布
- 动感PPT背景设计模板精选
- 《C#本质论 第4版》深度解析C#5.0特性
- 金属质感的变形金刚卡通PPT模板下载
- Swing框架打造的数独生成器
- FPSMath Discord机器人:游戏敏感度转换新工具
- M14: 一个无需维护的Web MPD音乐流媒体客户端
- 深度学习医学图像分割数据集:Task02_Heart分析
- SIMOTICS GP, SD, DP电机操作精简指南
- 下载黑色古典风格艺术花纹PowerPoint模板
- CSS从基础到进阶的30天学习计划
- 乘用车BCM控制器源码剖析:遥控、防盗与uds诊断
- Tvde1-Selfbot: Discord自助机器人的制作与分享
- Java实现的学生信息管理系统的开发与应用
- 春节主题PPT模板下载-迎春接福设计
- Java实现的Simple Dots游戏,玩家可与电脑对战随机决策
