两步检测算法详解:从R-CNN到Mask R-CNN
143 浏览量
更新于2024-08-29
1
收藏 2.22MB PDF 举报
"本文总结了从RCNN到Mask R-CNN的目标检测算法发展,包括R-CNN的基本流程、存在的问题及SPPNet的改进,最后提及了两步检测模型Light-Head R-CNN的引入。"
目标检测是计算机视觉领域中的核心任务之一,它旨在识别并定位图像中的物体。本文主要关注两步检测算法,即R-CNN(Region-based Convolutional Neural Network)及其后续改进。R-CNN由Ross Girshick等人提出,它的出现标志着深度学习在目标检测上的突破。
R-CNN算法流程如下:
1. 使用Selective Search等方法生成1K到2K个候选区域(RoIs,Region of Interest),这些区域大小不一。
2. 对每个缩放后的RoI(warped region)应用预训练的CNN(如AlexNet或VGG)提取特征,并将特征保存到磁盘。
3. 读取特征,将其输入到每个类别的支持向量机(SVM)分类器,判断RoI是否包含该类物体。
4. 使用位置回归器调整RoI的位置,以更精确地框定物体。
R-CNN的优势在于:
- 结构清晰,易于理解。
- CNN自动提取特征,减少了人工特征工程的需求。
- Selective Search减少了候选区域数量,提高了检测质量。
- 相比滑动窗口法,提高了预测精度。
然而,R-CNN也存在显著的局限性:
- 计算效率低,每个RoI都需要单独处理。
- 固定尺寸的RoI可能导致物体比例失真,丢失细节。
- 非端到端训练,需要多阶段完成,包括预训练、微调、存储特征、训练SVM和位置回归。
- 磁盘存储大量特征,耗时且占用空间大。
- 候选区域生成过程耗时。
- 预测速度极慢,一张图片可能需要近50秒。
为解决这些问题,何凯明提出了SPP-Net(Spatial Pyramid Pooling Network)。SPP-Net将特征提取与RoI生成顺序反转,先提取全局图像的特征,然后对不同大小的RoI进行池化。这样避免了重复计算,提高了速度,同时保持了特征的尺度不变性。
随着研究的深入,Mask R-CNN进一步扩展了R-CNN系列,不仅检测物体,还能实现像素级的语义分割,即预测物体的精确轮廓。Light-Head R-CNN则是一种轻量级的改进模型,旨在提高检测速度,降低计算复杂度,同时保持一定的检测性能。
总结来说,从RCNN到Mask R-CNN的发展体现了目标检测技术的进步,从最初的基于区域的方法到现在的端到端网络,不断优化着检测速度、精度和效率。这些算法的演进为实际应用提供了更强大、更灵活的工具。
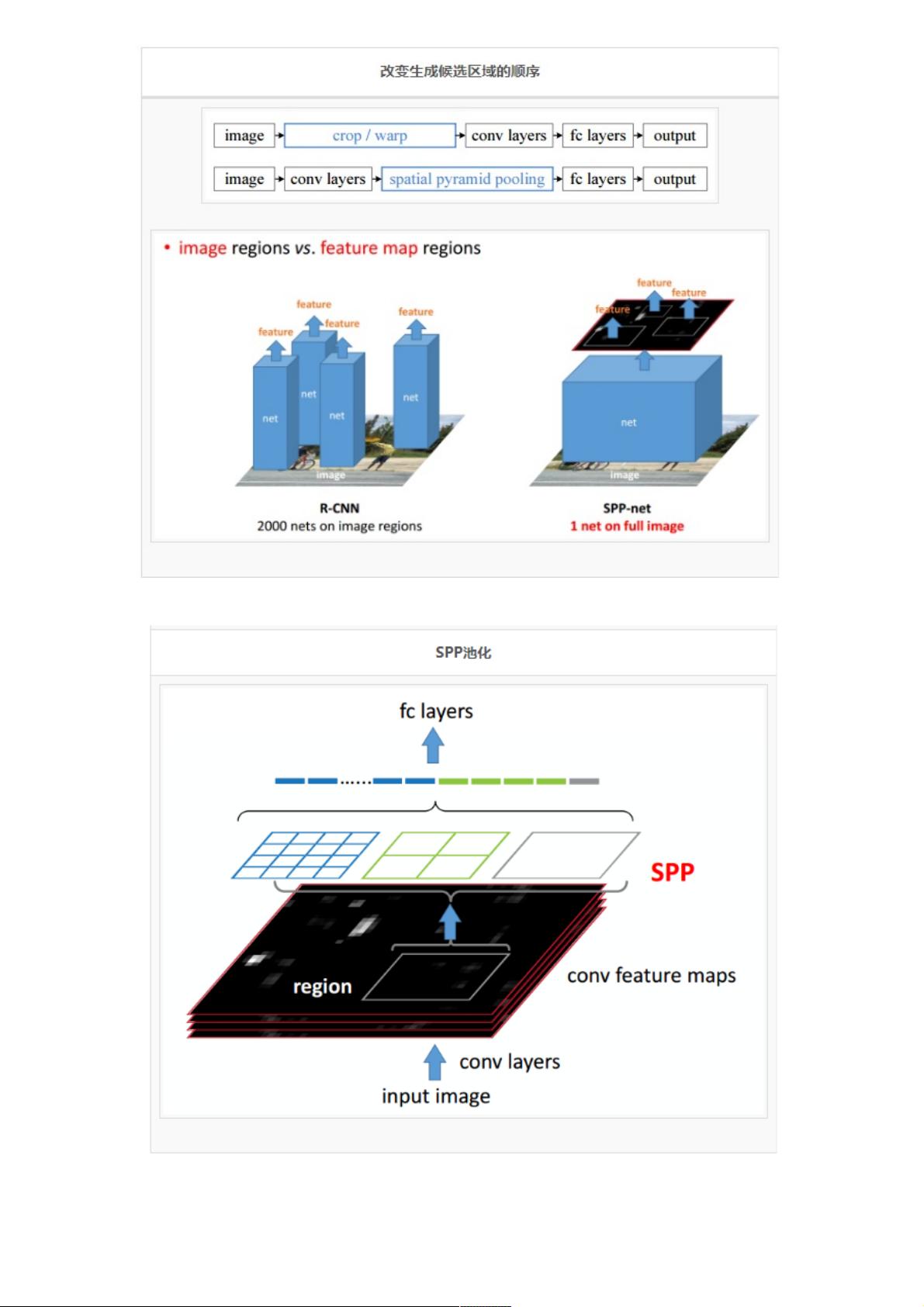
改变生成候选区域的顺序。从先生成候选区域再提取特征,变成先提取特征再生成候选区域,实现了特征提取部分的计算共
享,极大的减少计算量。生成候选区域的方式还是 selective search算法,在原图上生成候选区域后,映射到特征图上去。
使用SPP池化(Spatial pyramid model, 空间金字塔池化池化):传统的池化方式是 已知输入尺寸和 固定池化核大小,确定输
出尺寸,那么这时候输出尺寸肯定是随输入尺寸变化的,所以这时候就要求输入图片是固定尺寸。而SPP池化是 已知输入尺
剩余12页未读,继续阅读
2022-04-20 上传
2018-04-13 上传
点击了解资源详情
点击了解资源详情
2019-07-05 上传
2018-06-21 上传
点击了解资源详情
点击了解资源详情

weixin_38523728
- 粉丝: 3
- 资源: 973
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
