CAN总线协议详解 - 从入门到精通
需积分: 35 197 浏览量
更新于2024-07-25
收藏 4.71MB PDF 举报
"CAN总线协议讲解"
CAN总线,全称为Controller Area Network,是一种国际标准化的串行通信协议,最初由德国博世公司于1986年为汽车行业开发,以满足汽车内部多个电子控制系统的高效、可靠通信需求。随着技术的发展,CAN总线不仅在汽车领域广泛应用,还延伸到了工业自动化、船舶、医疗设备和工业设备等多个行业,因其高效率和高可靠性而备受认可。
CAN总线的特点包括:
1. **冗余和错误检测**:CAN协议有强大的错误检测和处理机制,如错误帧和过载帧的使用,确保了数据传输的准确性。
2. **优先级仲裁**:CAN总线采用非破坏性仲裁机制,不同节点间的通信基于ID的优先级决定,高优先级的节点可以中断低优先级节点的发送,而不会导致数据丢失。
3. **位填充**:为了防止连续相同的位出现,协议规定每五个连续的相同位后会自动插入一个反相位,这有助于保持信号的稳定。
4. **灵活的拓扑结构**:CAN支持多种网络拓扑,如总线型、星型和混合型,可以根据实际应用需求选择。
5. **自同步能力**:每个节点都能根据接收到的信号调整自己的时钟,实现硬件同步和再同步,确保全网同步通信。
6. **标准化**:CAN协议遵循ISO11898和ISO11519-2等国际标准,确保不同厂商设备之间的互操作性。
CAN协议包含的数据帧类型主要有:
- **数据帧**:用于传输实际数据,包括标识符(ID)、数据长度代码(DLC)和数据字段。
- **遥控帧**:请求其他节点发送数据帧,仅包含标识符。
- **错误帧**:当检测到错误时,节点会发送错误帧来标记问题。
- **过载帧**:用于在数据传输繁忙时通知其他节点延迟发送,避免拥堵。
- **帧间隔**:用于分隔不同帧的传输,确保正确识别帧边界。
CAN协议的位时序由主定时器(Bit Time)组成,包括传播时间、相位缓冲区1和相位缓冲区2,这些参数允许在不同的物理媒介上实现同步。此外,CAN协议还定义了错误状态的种类,如位错误、CRC错误和ACK错误等,以及相应的错误计数值,以监控网络健康状况。
CAN总线协议是一种高效、可靠的通信协议,尤其适用于需要实时性和容错性的环境。理解和掌握CAN协议对于设计和维护涉及CAN通信的系统至关重要。
应用手册
Page 8 of 48
5.2 错误计数值
发送错误计数值和接收错误计数值根据一定的条件发生变化。
错误计数值的变动条件如表 2 所示。
一次数据的接收和发送可能同时满足多个条件。
错误计数器在错误标志的第一个位出现的时间点上开始计数。
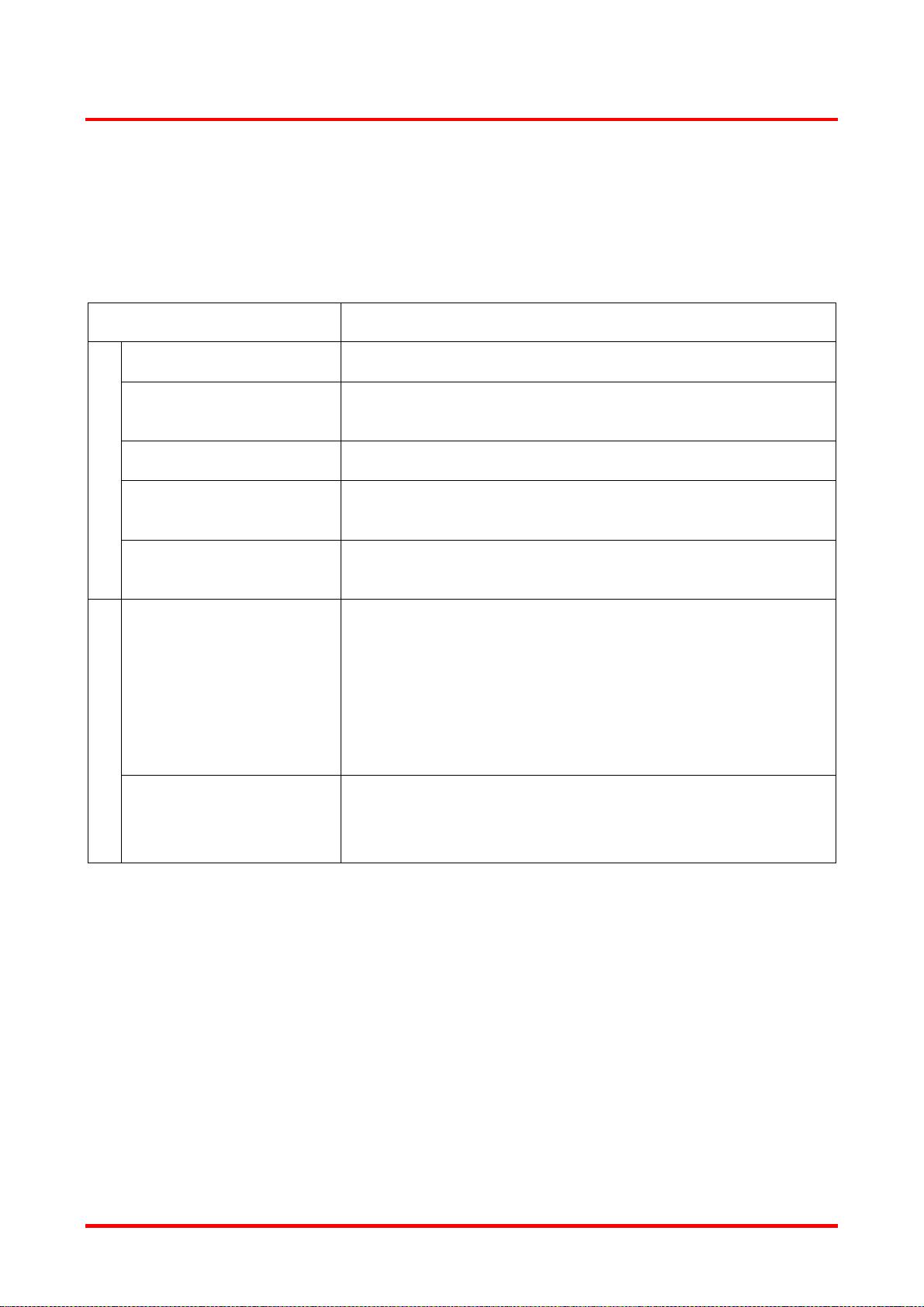
表 2. 错误计数值的变动条件
接受和发送错误计数值的变动条件 发送错误计数值
(TEC)
接收错误计数值
(REC)
1 接收单元检测出错误时。
例外:接收单元在发送错误标志或过载标志中检测出“位
错误”时,接收错误计数值不增加。
+1
2 接收单元在发送完错误标志后检测到的第一个位为显性电
平时。
+8
3 发送单元在输出错误标志时。 +8
4 发送单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
5 接收单元在发送主动错误标志或过载标志时,检测出位错
误。
+8
6 各单元从主动错误标志、过载标志的最开始检测出连续 14
个位的显性位时。
之后,每检测出连续的 8 个位的显性位时。
发送时
+8
接收时
+8
7 检测出在被动错误标志后追加的连续 8 个位的显性位时。 发送时
+8
接收时
+8
8 发送单元正常发送数据结束时(返回 ACK 且到帧结束也未
检测出错误时)。
−1
TEC=0 时±0
9 接收单元正常接收数据结束时(到 CRC 未检测出错误且正
常返回 ACK 时)。
1≤REC≤127 时-1
REC=0 时±0
REC>127 时
设 REC=127
10 处于总线关闭态的单元,检测到 128 次连续 11 个位的隐
性位。
TEC=0
REC=0
剩余48页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2015-06-16 上传
2016-02-03 上传
2021-06-04 上传
2019-09-25 上传
2023-03-04 上传

新手菜鸟
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
