基于STM32的微型步进电机驱动控制器设计与实现
119 浏览量
更新于2023-03-03
3
收藏 713KB PDF 举报
基于STM32的微型步进电机驱动控制器设计
本设计旨在设计了一种微型步进电机驱动控制器,通过上位机界面修改步进电机转速、旋转角度、细分系数。该设计以STM32F103T8U6作为主控制器,以A4988步进电机驱动设备,上位机串口界面作为人机接口界面,详细分析步进电机驱动设备的工作原理、各部分接口电路以及控制器设计方案。
1、微型步进电机驱动控制器设计
微型步进电机驱动控制器是指通过电子控制来控制微型步进电机的转速、旋转角度和细分系数的设备。该控制器通常由微控制器、驱动器和电机三部分组成。微控制器负责接收来自上位机的指令,并将其转换为电机控制信号;驱动器负责将电机控制信号转换为电机驱动信号;电机则是执行实际运动的部件。
2、STM32F103T8U6微控制器
STM32F103T8U6是STMicroelectronics公司生产的一款32位微控制器,基于ARM Cortex-M3内核,工作频率可达72MHz,具有128KB的Flash存储器和20KB的SRAM。该微控制器具有丰富的外设接口,包括USART、UART、SPI、I2C、I2S、CAN、USB等,非常适合应用于微型步进电机驱动控制器的设计。
3、A4988步进电机驱动器
A4988是一款完全的微步电动机驱动器,带有内置转换器,易于操作。该产品可在全、半、1/4、1/8及1/16步进模式时操作双极步进电动机,输出驱动性能可达35V及±2A。A4988包括一个固定关断时间电流稳压器,该稳压器可在慢或混合衰减模式下工作。
4、微型步进电机驱动控制器的设计方案
微型步进电机驱动控制器的设计方案主要包括三个部分:步进电机驱动器、微控制器和上位机界面。步进电机驱动器负责将电机控制信号转换为电机驱动信号;微控制器负责接收来自上位机的指令,并将其转换为电机控制信号;上位机界面负责提供人机交互界面,允许用户设置步进电机的转速、旋转角度和细分系数。
5、步进电机驱动控制器的工作原理
步进电机驱动控制器的工作原理可以分为三部分:电机控制信号的生成、电机驱动信号的生成和电机的运行控制。电机控制信号的生成是指微控制器根据上位机的指令生成电机控制信号的过程;电机驱动信号的生成是指步进电机驱动器将电机控制信号转换为电机驱动信号的过程;电机的运行控制是指电机根据电机驱动信号的控制信号进行实际运行的过程。
6、微型步进电机驱动控制器的应用
微型步进电机驱动控制器的应用非常广泛,例如在自动化生产线、机器人、医疗设备、打印机、复印机等领域都可以看到微型步进电机驱动控制器的身影。该控制器可以实现精确的步进电机控制,提高机器的运行效率和稳定性。
7、结论
本文设计了一种基于STM32的微型步进电机驱动控制器,通过上位机界面修改步进电机转速、旋转角度、细分系数。该设计以STM32F103T8U6作为主控制器,以A4988步进电机驱动设备,上位机串口界面作为人机接口界面,详细分析步进电机驱动设备的工作原理、各部分接口电路以及控制器设计方案。该设计可以实现精确的步进电机控制,提高机器的运行效率和稳定性。
基于基于STM32的微型步进电机驱动控制器设计的微型步进电机驱动控制器设计
设计了一种微型步进电机驱动控制器,通过上位机界面修改步进电机转速、旋转角度、细分系数。该设计以
STM32F103T8U6作为主控制器,以A4988步进电机驱动设备,上位机串口界面作为人机接口界面,详细分析步
进电机驱动设备的工作原理、各部分接口电路以及控制器设计方案。通过实物设计实现了步进电机转速、正反
转任意角度和细分系数的控制,并通过精确计算步进脉冲个数实现了任意旋转角度的精确控制,该驱动控制器
步进角度精度高达0.112 5度。
摘摘 要要: 设计了一种
关键词 关键词: 微型步进电机;STM32F103T8U6;A4988;串口;正反转
0 引言引言
自从上世纪20年代英国人开发了步进电机,50年代后期晶体管的发明也逐渐应用在步进电机上,并使得步进电机的数字
化控制更为方便。经过不断改良,今日步进电机已广泛运用在生产过程中要求自动化、省人力、效率高的机器中,尤其在重视
速度、位置控制、需要精确操作指令动作的灵活控制场合步进电机用得最多。
本文旨在以STM32F103T8U6[1]作为A4988[2]控制器,并以A4988作为微型步进电机驱动器设计步进电机控制器模块,实
现闭环精确控制微型步进电机的步进角度的功能,并从多方面深入分析A4988的工作原理以及微型步进电机速度控制和步进角
度精确控制策略[3-4]。
1 A4988的特性和工作原理的特性和工作原理
1.1 A4988的特性的特性
A4988是一款完全的微步电动机驱动器,带有内置转换器,易于操作。该产品可在全、半、1/4、1/8及1/16步进模式时操
作双极步进电动机,输出驱动性能可达35 V及±2 A。A4988包括一个固定关断时间电流稳压器,该稳压器可在慢或混合衰减模
式下工作。转换器是A4988易于实施的关键。只要在“步进”输入中输入一个脉冲,即可驱动电动机产生微步。无须进行相位顺
序表、高频率控制行或复杂的界面编程。A4988界面非常适合复杂的微处理器不可用或过载的应用。在微步运行时,A4988内
的斩波控制可自动选择电流衰减模式(慢或混合)。在混合衰减模式下,该器件初始设置为在部分固定停机时间内快速衰减,
然后在余下的停机时间慢速衰减。混合衰减电流控制方案能减少可听到的电动机噪音,增加步进精确度并减少功耗。提供内部
同步整流控制电路,以改善脉宽调制(PWM)操作时的功率消耗。内部电路保护包括:带滞后的过热关机、欠压锁定
(UVLO)及交叉电流保护,不需要特别的通电排序。
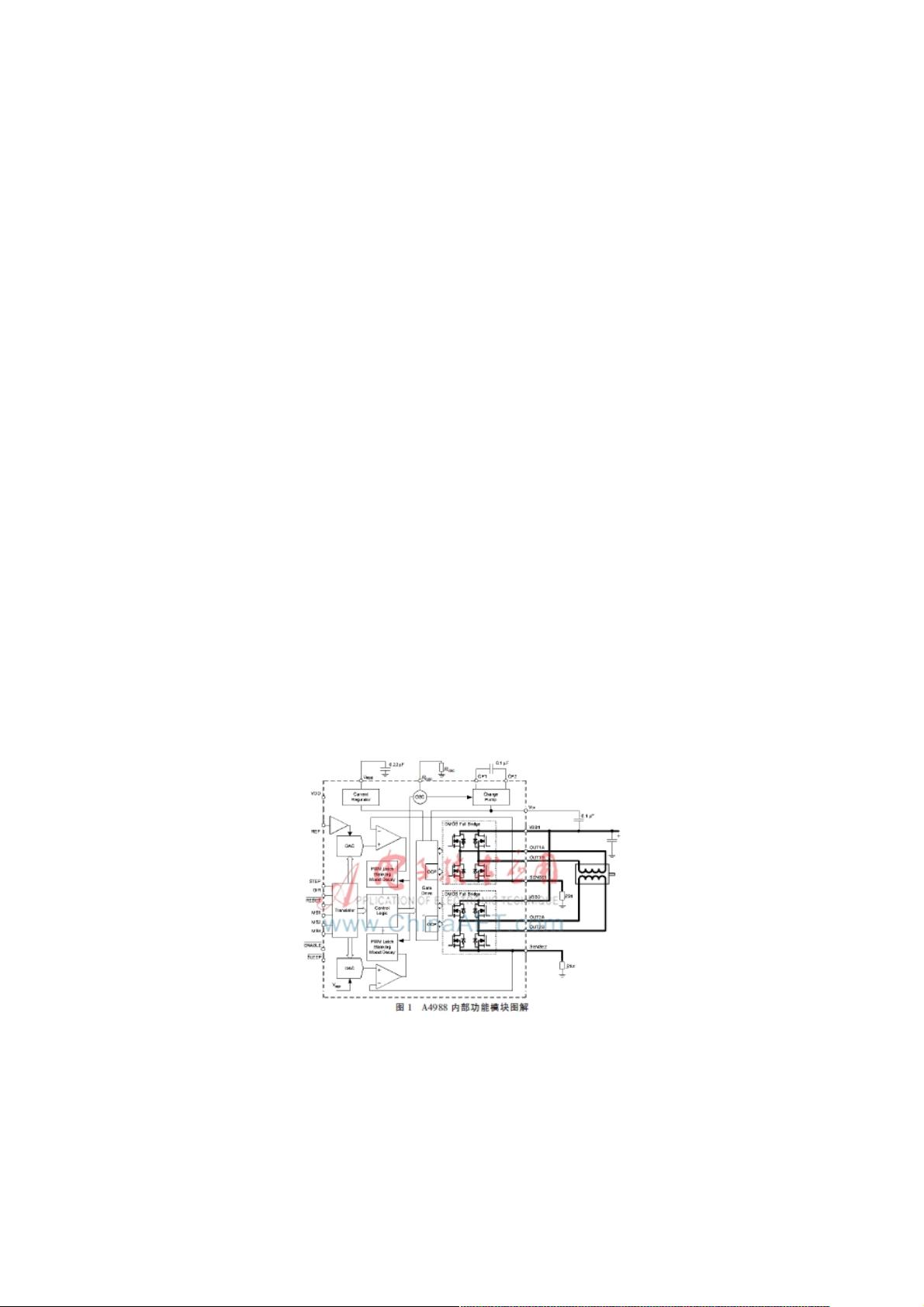
1.2 A4988的工作原理的工作原理
为了更加清晰地分析A4988的工作原理,首先深入分析A4988的内部结构。如图1所示为A4988的内部结构图和典型的外
部电路连接图。
由图1所示,A4988有一个编译器(Translator),主要负责微控制器和驱动电路的信息交互。通过该编译器可产生DA信
号,配合比较器辅助PWM锁存器修复衰减信号,并且该编译器能够产生逻辑电平控制逻辑控制器,逻辑控制器再配合电流调
节器和N型MOS管驱动电压共同驱动两路全桥电路。电路中所标电容必须严格与技术文档中所给的相同,Rosc主要更改并修
复衰减模式,接VDD自动修复衰减,接GND电流衰减设置为增减电流同时修复。SENSE1和SENSE2检测驱动输出电压,实
则是实时检测输出电流,供电流调节器调节输出电流信号,形成闭环控制。因此SENSE1和SENSE2管脚连接的电阻非常关
键,一般这个电阻的阻值在零点几欧姆左右。
1.3 A4988逻辑控制策略逻辑控制策略
A4988控制逻辑简单,主要分为睡眠、正反转、复位、使能、细分等模式控制。
(1)睡眠模式:Sleep管脚电平置0,进入睡眠模式,驱动器输出待机模式;Sleep管脚置1,驱动器处于正常工作状态;
下载后可阅读完整内容,剩余3页未读,立即下载
2021-01-20 上传
2023-06-09 上传
2022-04-27 上传
2021-01-28 上传
2024-04-24 上传
2019-03-27 上传
点击了解资源详情

weixin_38708707
- 粉丝: 5
- 资源: 899
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
