
python+opencv车道线检测(简易实现)车道线检测(简易实现)
python+opencv车道线检测(简易实现)车道线检测(简易实现)
技术栈:技术栈:python+opencv
实现思路:实现思路:
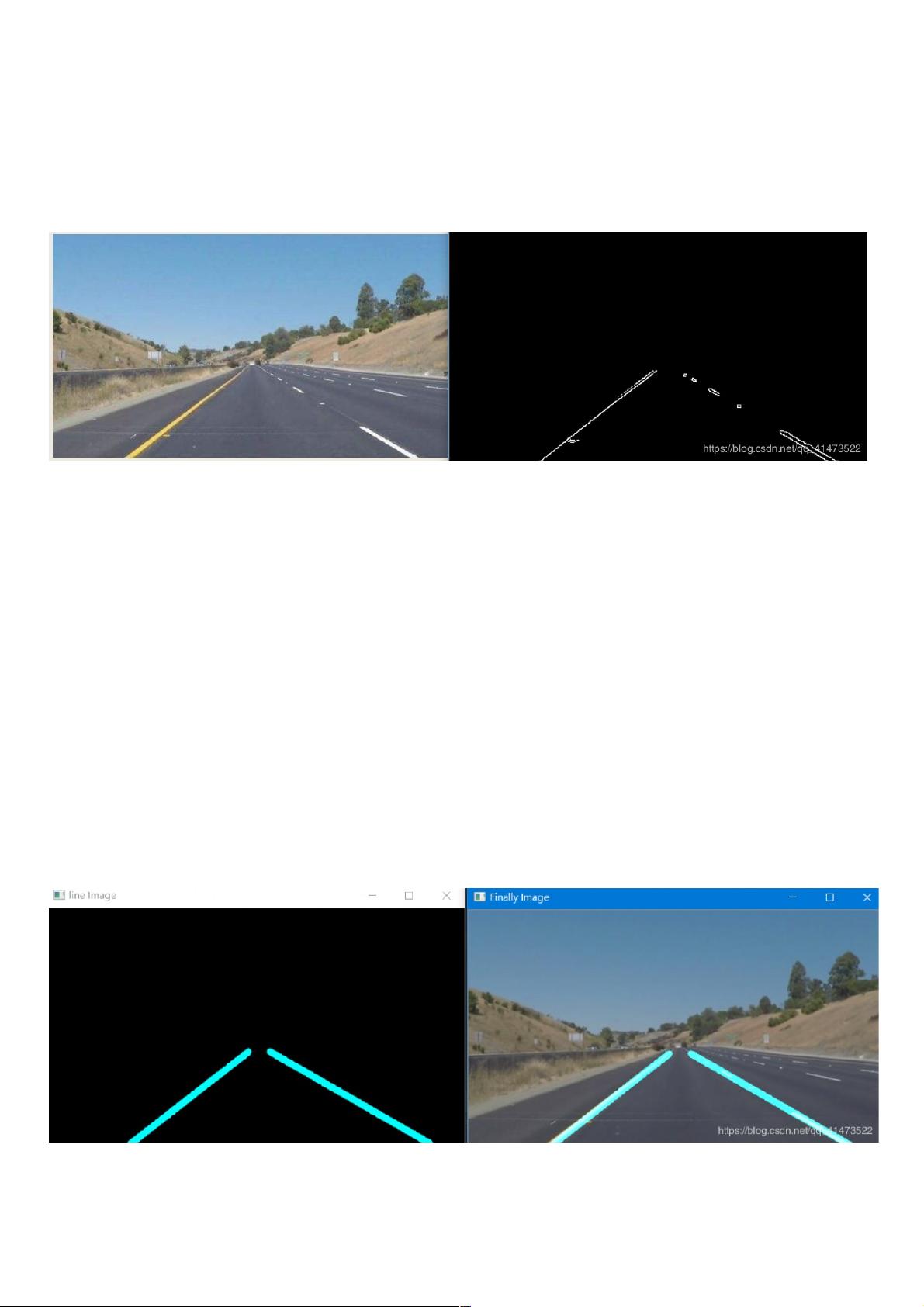
canny边缘检测获取图中的边缘信息;
霍夫变换寻找图中直线;
绘制梯形感兴趣区域获得车前范围;
得到并绘制车道线;
效果展示:效果展示:
代码实现:代码实现:
import cv2
import numpy as np
def canny():
gray = cv2.cvtColor(lane_image, cv2.COLOR_RGB2GRAY)
#高斯滤波
blur = cv2.GaussianBlur(gray, (5, 5), 0)
#边缘检测
canny_img = cv2.Canny(blur, 50, 150)
return canny_img
def region_of_interest(r_image):
h = r_image.shape[0] w = r_image.shape[1] # 这个区域不稳定,需要根据图片更换
poly = np.array([
[(100, h), (500, h), (290, 180), (250, 180)] ])
mask = np.zeros_like(r_image)
# 绘制掩膜图像
cv2.fillPoly(mask, poly, 255)
# 获得ROI区域
masked_image = cv2.bitwise_and(r_image, mask)
return masked_image
if __name__ == '__main__':
image = cv2.imread('test.jpg')
lane_image = np.copy(image)
canny = canny()
cropped_image = region_of_interest(canny)
cv2.imshow("result", cropped_image)
cv2.waitKey(0)
霍夫变换加线性拟合改良:霍夫变换加线性拟合改良:
效果图:效果图:
代码实现:代码实现:
主要增加了根据斜率作线性拟合过滤无用点后连线的操作;
import cv2
import numpy as np
def canny():
gray = cv2.cvtColor(lane_image, cv2.COLOR_RGB2GRAY)

weixin_38689191
- 粉丝: 5
- 资源: 958
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 27页智慧街道信息化建设综合解决方案.pptx
- 计算机二级Ms-Office选择题汇总.doc
- 单链表的插入和删除实验报告 (2).docx
- 单链表的插入和删除实验报告.pdf
- 物联网智能终端项目设备管理方案.pdf
- 如何打造品牌的模式.doc
- 样式控制与页面布局.pdf
- 武汉理工Java实验报告(二).docx
- 2021线上新品消费趋势报告.pdf
- 第3章 Matlab中的矩阵及其运算.docx
- 基于Web的人力资源管理系统的必要性和可行性.doc
- 基于一阶倒立摆的matlab仿真实验.doc
- 速运公司物流管理模式研究教材
- 大数据与管理.pptx
- 单片机课程设计之步进电机.doc
- 大数据与数据挖掘.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论1