
无
人驾驶作为目前人工智能行
业 最 受 关 注 的 应 用 场 景 之
一,担当着革新汽车行业甚至是交
通运输业未来的重要使命。无人驾
驶能够真正地解放人类双手,提高
行车安全,通过更普及的运力共享,
在缓解交通拥堵的同时可大大地减
少对环境的污染。随着无人车的普
及,无人驾驶将成为未来智慧公共
出行的主要方式,是未来智慧城市
的重要联结之一
[1]
。
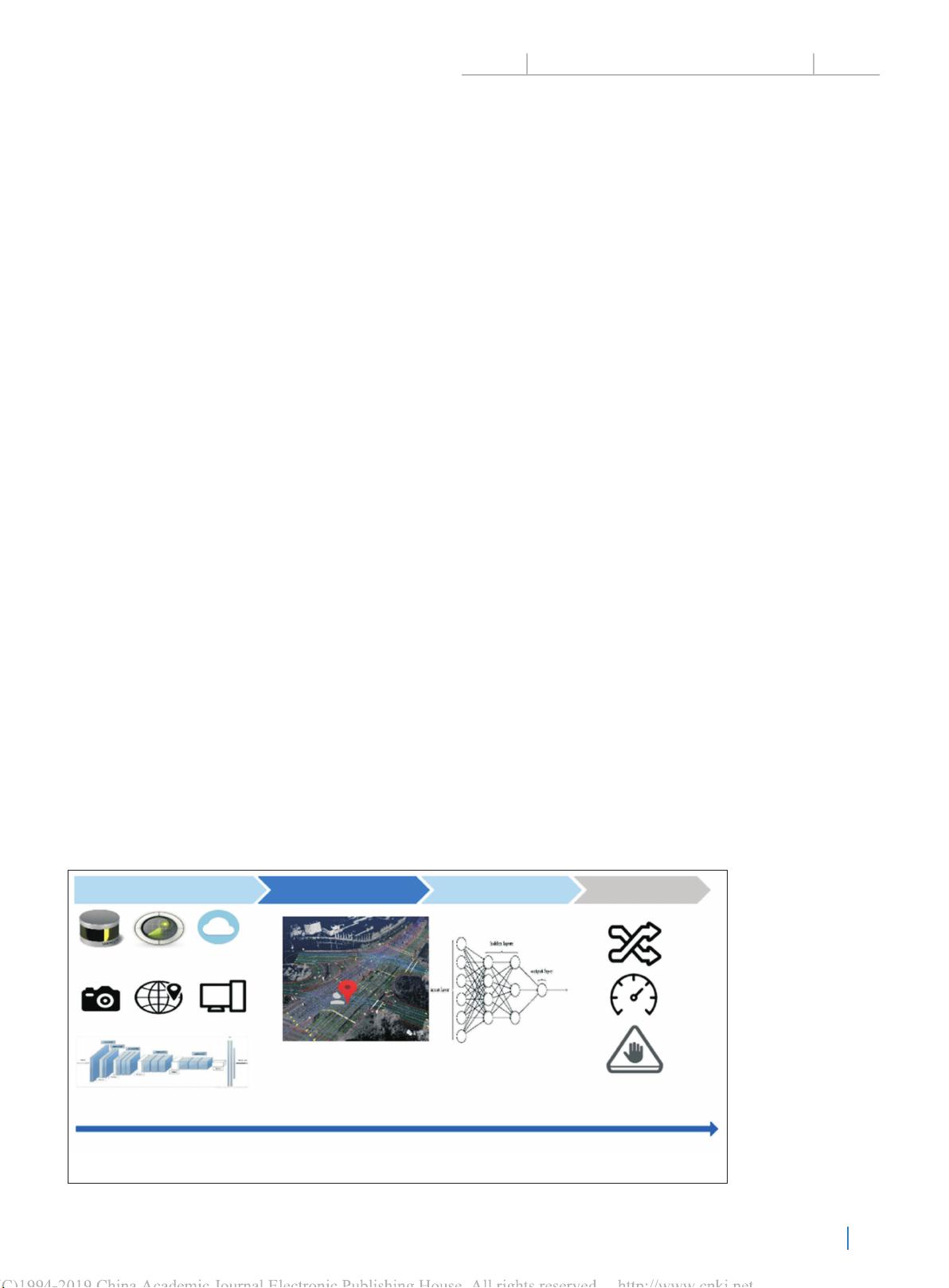
在无人驾驶应用中,高精地图
是其必不可少的实现基础。高精地
图是对物理世界路况的精准还原,
通过道路信息的高精度承载,利用
超视距信息,和其他车载传感器形
成互补,打破车身传感的局限性,实
现感知的无限延伸。以底层的高精
度地图数据为基础,在此之上叠加
动态交通数据,通过高速通信完成
交通信息的实时更新以及驾驶预警
推送,为无人驾驶行车决策提供强
有力的指导
[2-3]
。
相比于传统的电子地图,高精
地图具有数据高精度、信息高维度
以及高实时性的特点。随着感知范
围的延伸和传感精度的提高,高精
度地图有能力构建更精确的定位、
更广范围的环境感知、更完备的交
通信息,从而为无人驾驶提供感知、
定位、决策等多种支持
[4-5]
。高精度
地图不仅仅包含对道路静态元素
10~20 cm 厘米精度的三维表示,
如车道线、曲率、坡度和路侧物体
等,还包括了驾驶环境中各种动态
信息,如车道限速、车道关闭、道路
DOI:10.12142/ZTETJ.201903009
网络出版地址:http://kns.cnki.net/kcms/detail/
34.1228.TN.20190605.1604.004.html
网络出版日期:2019-06-05
收稿日期:2018-12-15
摘 要 :高精 度地 图 作 为 无人 驾驶 应用 中 辅 助 驾驶 的重 要手 段,在 高 精度 定位 、辅助 环 境 感
知、控制决策等方面发挥着重要作用。边缘计算将计算、存储、共享能力从云端延伸到网络
边缘,使用“业务应用在边缘,综合管理在云端”的模 式 ,非常适合于部署更新 频 率 高 、实时
服务延迟低、覆盖面积广的高精地图服务。结合众包的边缘地图服务已经成为高精地图更
新的主要方式,有着重要的应用前景。
关键 词 :高精地图;无人驾驶;边缘计算;众包
Abstract: High-precision map plays an important role in autonomous driving, and it is the
important foundation for high-precision positioning, environmental perception and control
decision. Edge computing extends computing, storage and data sharing from cloud to
network edge thus it is very suitable for deploying high-precision map services. With the
mode of "deployment in edge, management in cloud", edge high-precision map service can
provide high update frequency, low real-time service delay and wide coverage area.
Combined with crowdsourcing, edge high-precision map has become the applicable and
promising solution for low-cost and high-precision map updating.
Key words: high-precision map; autonomous driving; edge computing; crowdsourcing
面向无人驾驶的边缘
高精地图服务
Edge HighEdge High-Precise Map Services for-Precise Map Services for
AutonomoAutonomous Drivingus Driving
唐洁/TANG Jie
1
,刘少山/L IU Shaoshan
2
(1. 华南理工大学,广东 广州 510006;
2. 深圳普思英察科技有限公司,广东 深圳 518000)
(1. South China University of Technology, Guangzhou 510006, China;
2. Shenzhen PerceptIn Technology Co., Ltd., Shenzhen 518000, China)
中兴通讯技术
2019 年 6 月 第 25 卷第 3 期 Jun. 2019 Vol. 25 No. 3
58

剩余10页未读,继续阅读

changfeng88888
- 粉丝: 3
- 资源: 19
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 27页智慧街道信息化建设综合解决方案.pptx
- 计算机二级Ms-Office选择题汇总.doc
- 单链表的插入和删除实验报告 (2).docx
- 单链表的插入和删除实验报告.pdf
- 物联网智能终端项目设备管理方案.pdf
- 如何打造品牌的模式.doc
- 样式控制与页面布局.pdf
- 武汉理工Java实验报告(二).docx
- 2021线上新品消费趋势报告.pdf
- 第3章 Matlab中的矩阵及其运算.docx
- 基于Web的人力资源管理系统的必要性和可行性.doc
- 基于一阶倒立摆的matlab仿真实验.doc
- 速运公司物流管理模式研究教材
- 大数据与管理.pptx
- 单片机课程设计之步进电机.doc
- 大数据与数据挖掘.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0