禾川X3E伺服驱动CANopen-EtherCAT详细指南
本资源是一份禾川X3E/X2E系列伺服驱动器的CANOpen/EtherCAT用户手册,发布于2019年05月V1.1版本。该手册详细介绍了如何利用CANOpen和EtherCAT通信技术来控制和管理这些伺服驱动器。以下是从手册中提炼出的主要知识点:
1. **产品信息**:
- 提供了产品综合参数,包括但不限于驱动器的功能、规格和性能指标,以便用户了解其适用范围和特性。
2. **网络连接**:
- **CANOpen协议**:介绍了CANOpen的基本概念,包括对象字典(Object Dictionary)、节点地址(Node ID)、通讯对象标识符(COB-ID)、网络管理系统(NMT)及其错误控制机制。
- ** EtherCAT通讯**:
- EtherCAT是一种实时工业以太网协议,适用于高性能、高精度的自动化应用。
- 详细解释了EtherCAT帧结构、状态机、控制模式(如位置控制和速度控制)、过程数据对象(PDO)、邮箱数据SDO以及分布式时钟等关键概念。
- 用户需了解如何设置伺服驱动器的从站地址和ESI(Equipment State Information)文件。
3. **控制模式**:
- **轮廓位置模式(ProfilePositionMode,PP)**:这是一种常用的位置控制模式,用户可以在这里学习如何配置运动路径和速度曲线。
4. **实际操作**:
- 通过SDO(Service Data Object)进行参数设置,包括往伺服驱动器写入和读取参数,以调整驱动器的行为。
- PDO(Process Data Object)的使用,展示了如何在 EtherCAT网络中发送和接收数据,确保精确的控制信号传输。
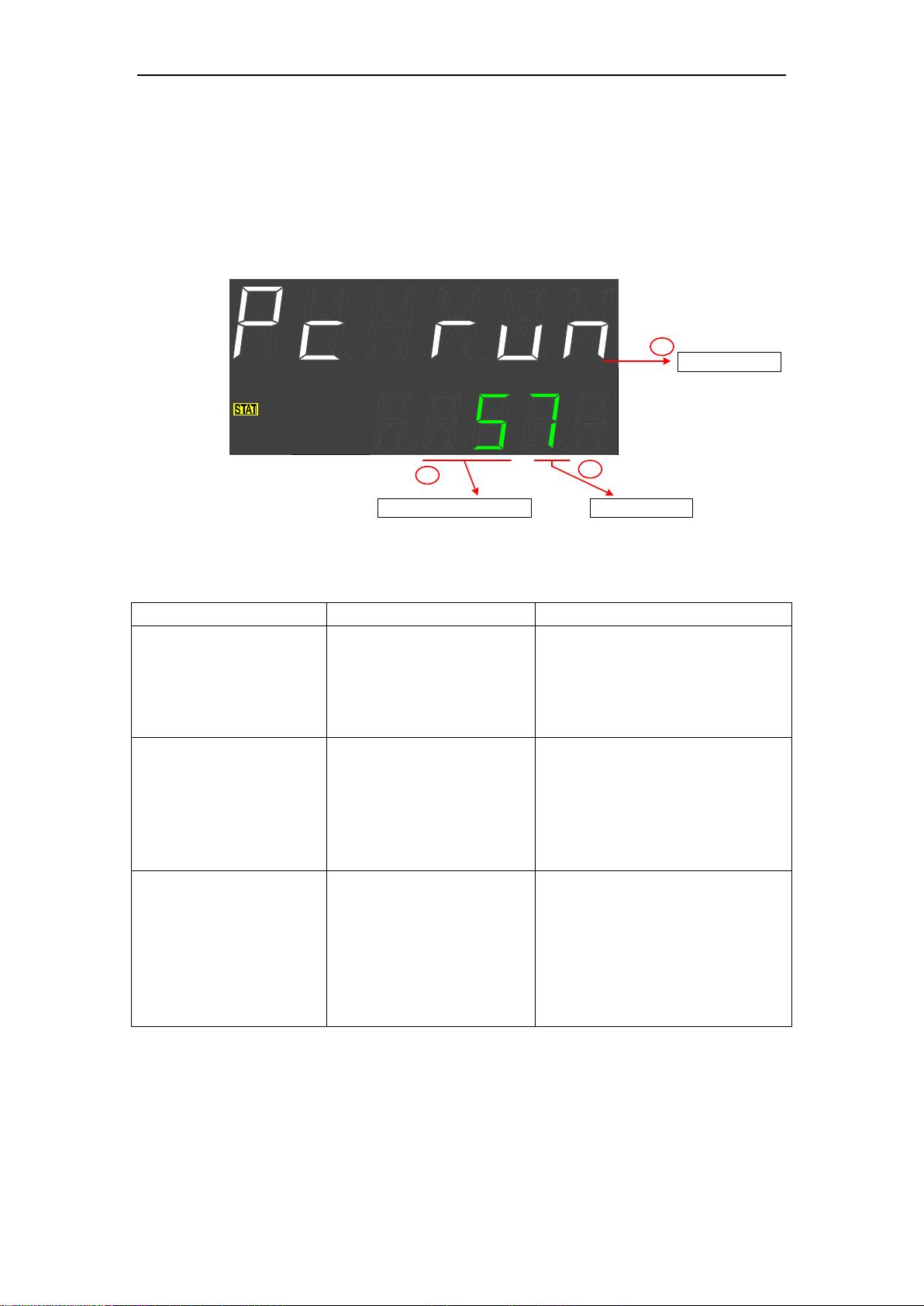
5. **面板状态显示**:
- 提供了关于伺服驱动器面板状态的指示,帮助用户实时监控驱动器的工作状态和故障信息。
这份用户手册对于熟悉CANOpen和EtherCAT技术的工程师来说是一份宝贵的参考资料,无论是初次接触还是经验丰富的用户,都能从中找到所需的信息来优化伺服系统的集成和维护。
SV_XE 系列伺服驱动器 CANOpen/EtherCAT 用户手册
16
3.5.2 往伺服驱动器从站读参数
往伺服驱动器从站读参数,请求报文格式如表 3-21 所示,其中字节 0 是命令码,无论读多
少位宽的数据,命令码都是 40h。
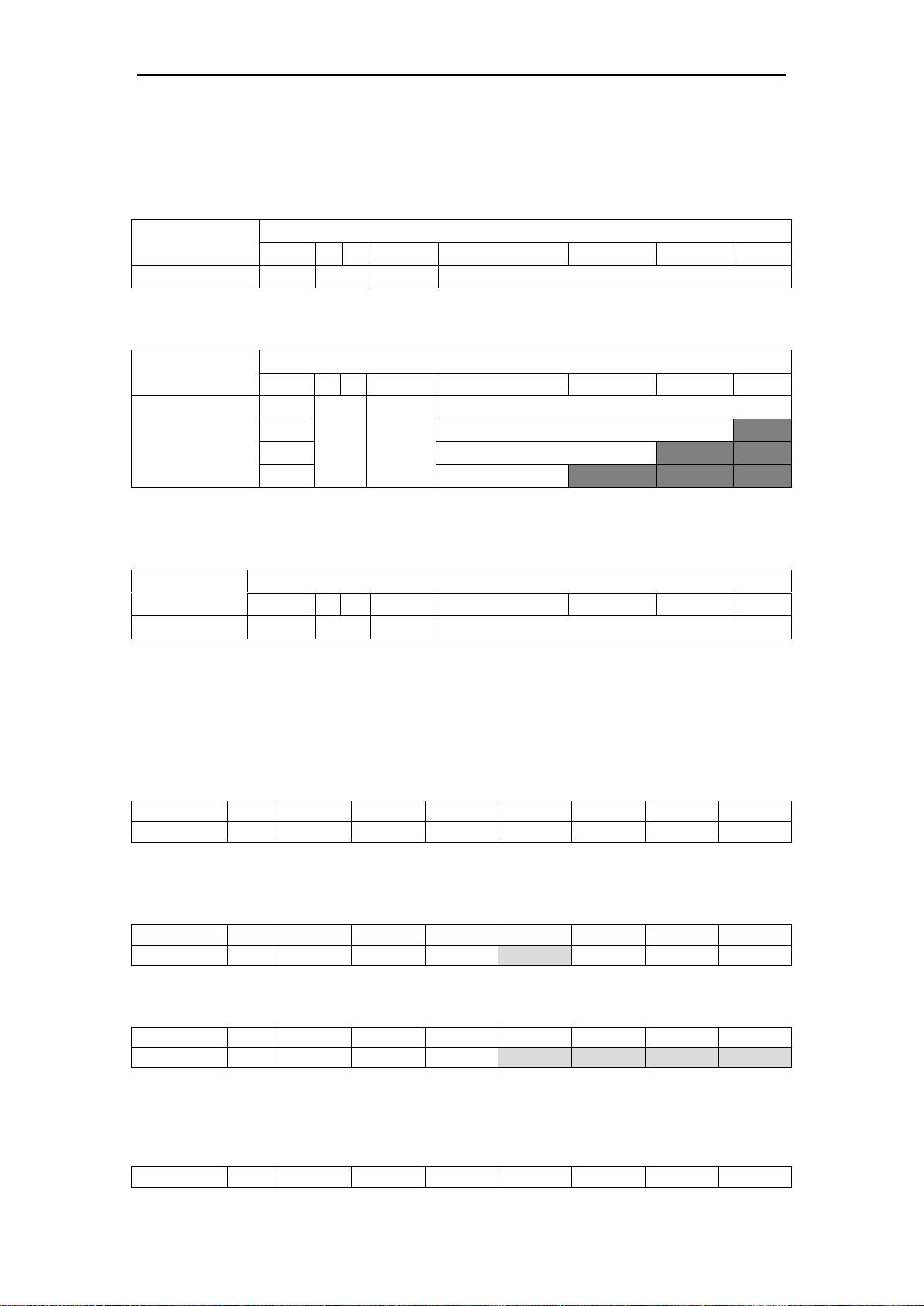
表 3-21,SDO 读参数时的请求报文格式
COB-ID
DATA
0
1
2
3
4
5
6
7
600h+Node-ID
40h
索引
子索引
00
如果读取成功,应答报文格式如表 3-22 所示:
表 3-22,SDO 读参数成功时的应答报文格式
COB-ID
DATA
0
1
2
3
4
5
6
7
580h+Node-ID
43h
索引
子索引
数据(4 字节)
47h
数据(3 字节)
/
4Bh
数据(2 字节)
/
/
4Fh
数据(1 字节)
/
/
/
如果读取失败,此时命令码是 80h,数据字节 4~7 表示相应的中止码,应答报文格式如表
3-23 所示,报文内的中止代码参见第六章表 6-3:
表 3-23,SDO 读参数失败时的应答报文格式
COB-ID
DATA
0
1
2
3
4
5
6
7
580h+Node-ID
80h
索引
子索引
中止代码
下面举实例说明 SDO 读数据,示例中 Node-ID 号为 2。三个示例分别说明了 SDO 读 8
位、16 位和 32 位数据的请求报文和应答报文格式,示例中的数据都是十六进制。
(1)SDO 读插补周期时间单位(在字典中的索引为 60C201h),请求报文如表 3-24 所
示:
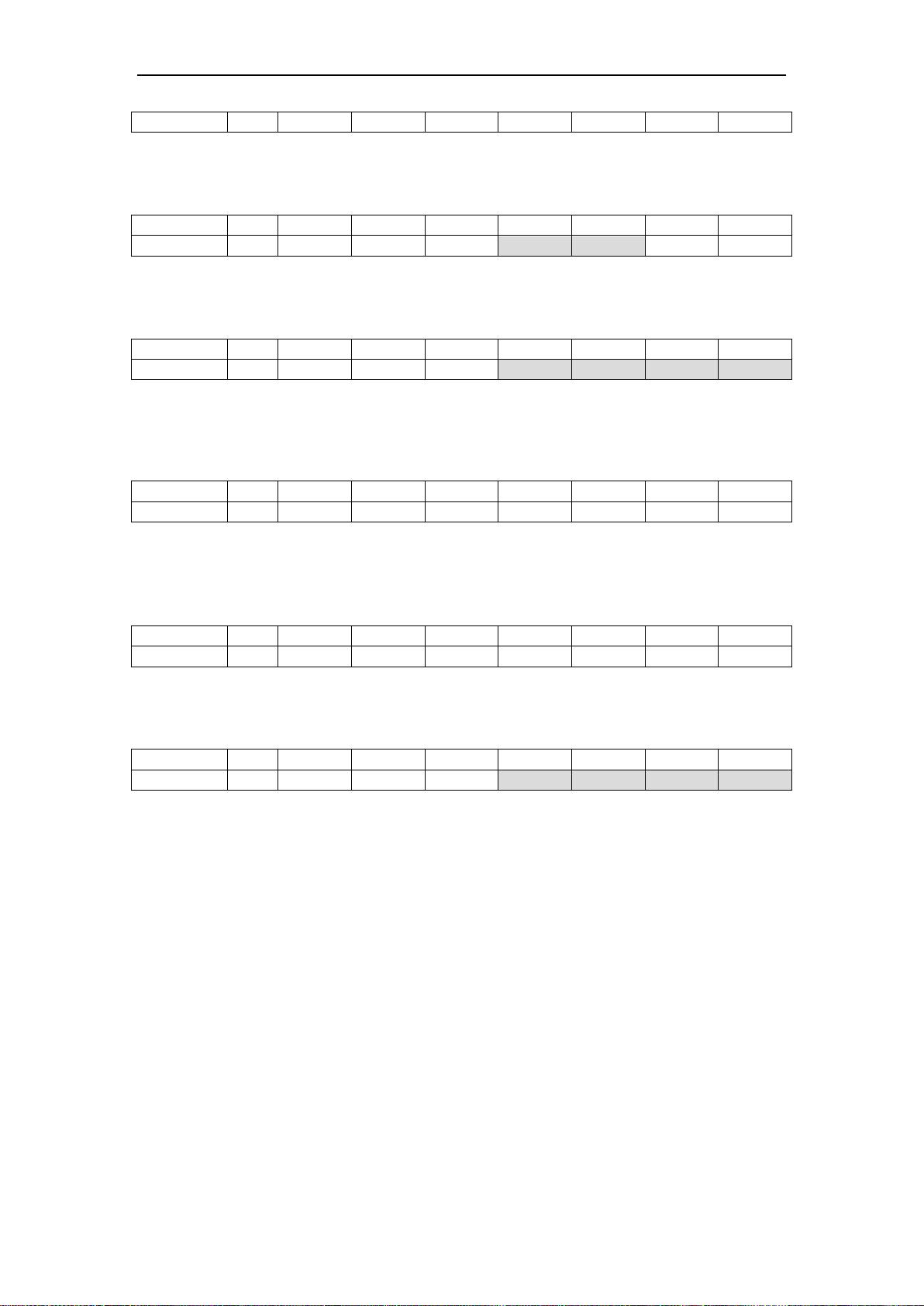
表 3-24,SDO 读参数时的请求报文示例 1(目标数据类型为 8 位)
COB-ID
0
1
2
3
4
5
6
7
602
40
C2
60
01
00
00
00
00
对象 60C201h 的数据类型为 UNSIGNED INTEGER8,因此数据字节 4~7 中只有字节 4
为有效数据。若读取成功,读取值为 3,则应答报文如表 3-25 所示:
表 3-25,SDO 读 8 位数据类型参数成功时的应答报文示例
COB-ID
0
1
2
3
4
5
6
7
582
4F
C2
60
01
03
00
00
00
若读取失败,此时数据字节 4~7 显示错误码,则应答报文如表 3-26 所示:
表 3-26,SDO 读 8 位数据类型参数失败时的应答报文示例
COB-ID
0
1
2
3
4
5
6
7
582
80
C2
60
01
xx
xx
xx
xx
(2)SDO 读取转矩指令(在字典中的索引为 607400h),请求报文如表 3-27 所示:
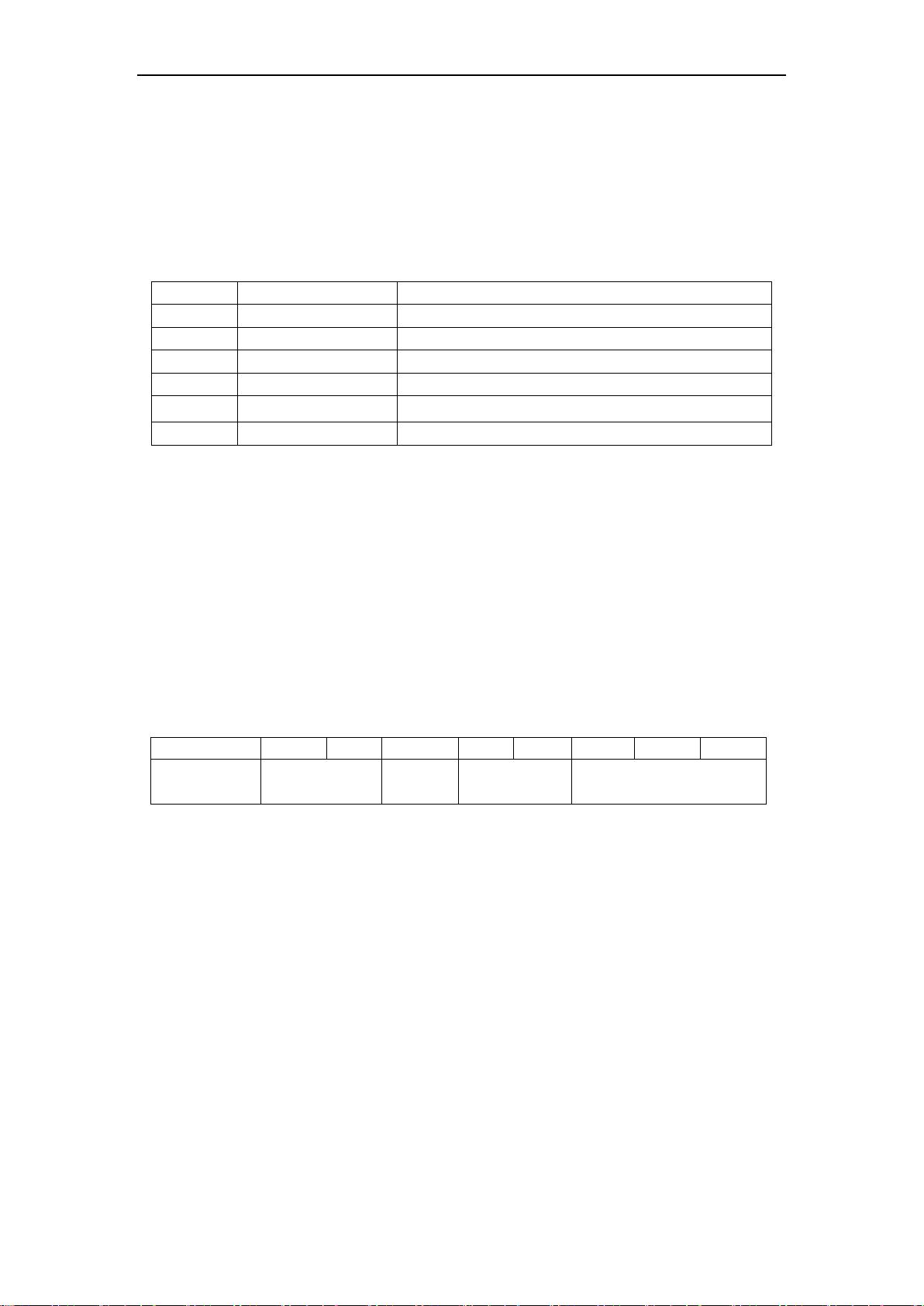
表 3-27,SDO 读参数时的请求报文示例 2(目标数据类型为 8 位)
COB-ID
0
1
2
3
4
5
6
7

剩余232页未读,继续阅读
2024-10-30 上传
2024-10-30 上传
2024-10-30 上传
2024-10-21 上传
2023-10-08 上传
2024-10-30 上传

摸金校尉07
- 粉丝: 2
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- BottleJS快速入门:演示JavaScript依赖注入优势
- vConsole插件使用教程:输出与复制日志文件
- Node.js v12.7.0版本发布 - 适合高性能Web服务器与网络应用
- Android中实现图片的双指和双击缩放功能
- Anum Pinki英语至乌尔都语开源词典:23000词汇会话
- 三菱电机SLIMDIP智能功率模块在变频洗衣机的应用分析
- 用JavaScript实现的剪刀石头布游戏指南
- Node.js v12.22.1版发布 - 跨平台JavaScript环境新选择
- Infix修复发布:探索新的中缀处理方式
- 罕见疾病酶替代疗法药物非临床研究指导原则报告
- Node.js v10.20.0 版本发布,性能卓越的服务器端JavaScript
- hap-java-client:Java实现的HAP客户端库解析
- Shreyas Satish的GitHub博客自动化静态站点技术解析
- vtomole个人博客网站建设与维护经验分享
- MEAN.JS全栈解决方案:打造MongoDB、Express、AngularJS和Node.js应用
- 东南大学网络空间安全学院复试代码解析
