
1
TIDUBZ1B–June 2016–Revised October 2016
Submit Documentation Feedback
Copyright © 2016, Texas Instruments Incorporated
EtherCAT
®
Master Reference Design for Sitara™ AM57x Gigabit Ethernet
and PRU-ICSS with Time-Triggered Send
TI Designs
EtherCAT
®
Master Reference Design for Sitara™ AM57x
Gigabit Ethernet and PRU-ICSS with Time-Triggered Send
All trademarks are the property of their respective owners.
TI Designs
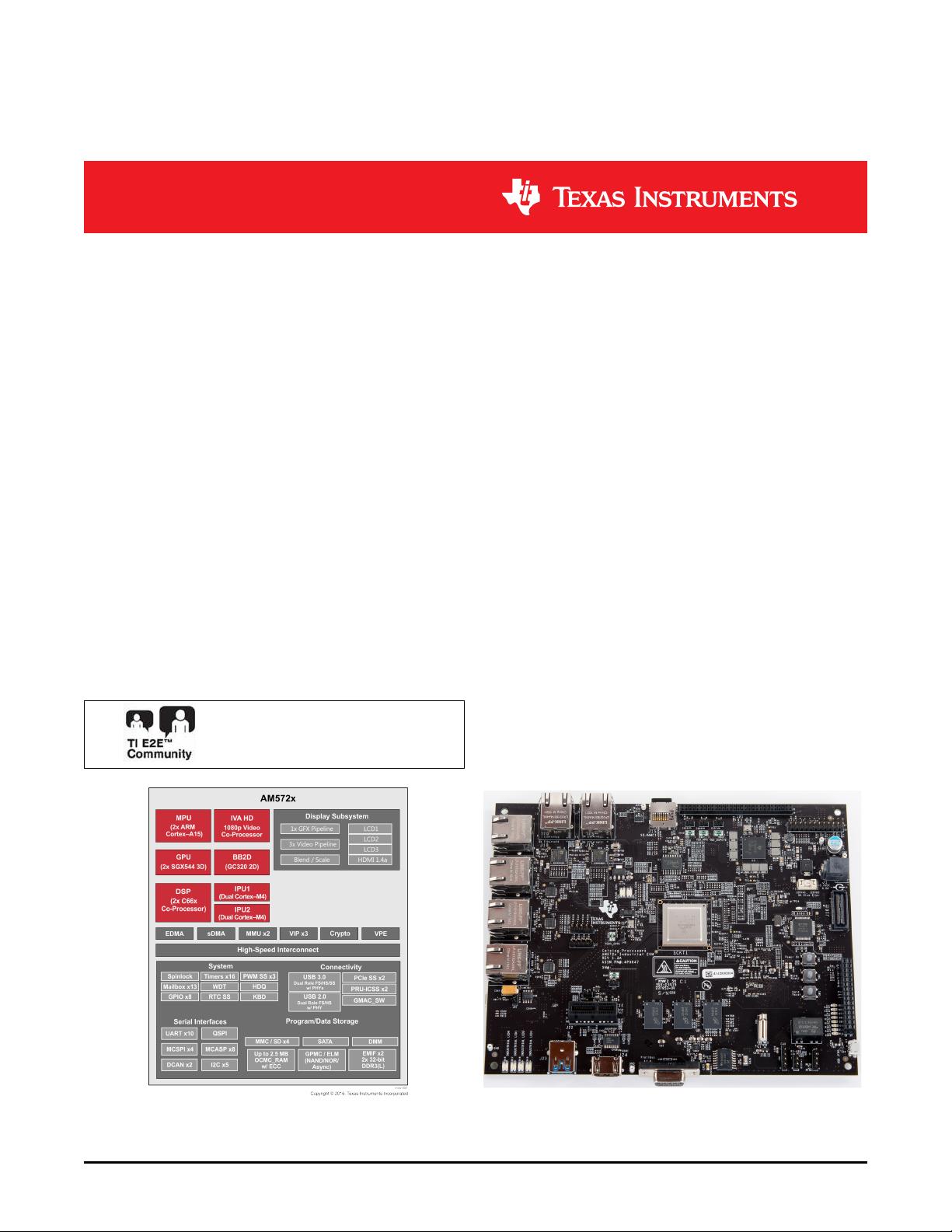
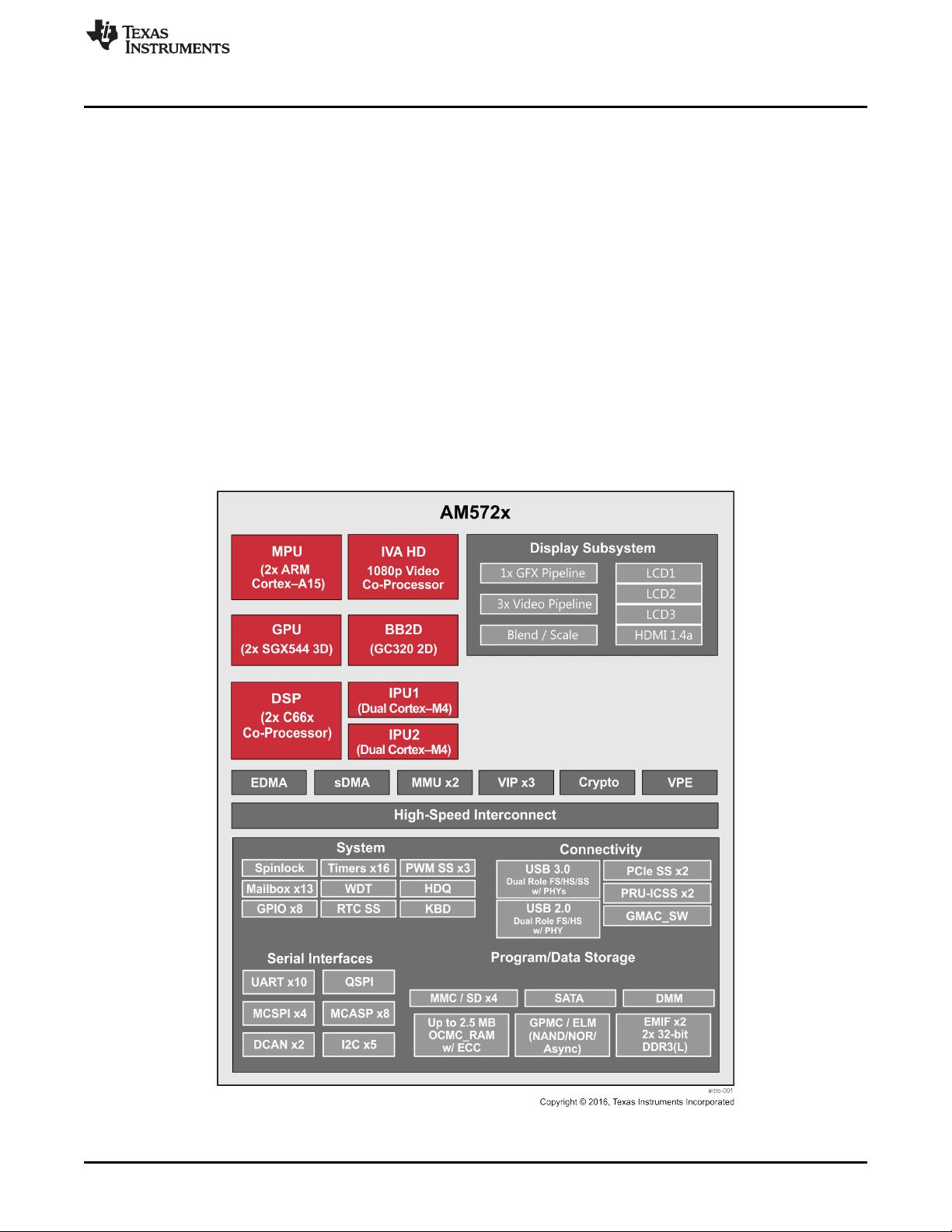
This TI Design details an EtherCAT
®
(EC) Master
interface operating on the Sitara™ AM572x processor
using the EC-Master stack from acontis. This
EtherCAT Master solution can be used for EtherCAT-
based PLC or motion control applications. EtherCAT
Master is profiled on the Gigabit Ethernet ports and the
PRU-ICSS Ethernet ports of the AM572x processor to
give designers flexibility to use any of the two Gigabit
Ethernet ports or four PRU-ICSS Ethernet ports on the
device. The EtherCAT Master implementation can
achieve less than 100-µs cycle times for both the
gigabit and the PRU-ICSS Ethernet ports.
Time-triggered send (TTS) can be enabled on the
PRU-ICSS to reduce jitter, achieve shorter cycle times,
and reduce latency in cases where distributed clocking
is not used.
Design Resources
TIDEP0079 Tools Folder
TMDXIDK5728 Tools Folder
TMDSIDK437x Tools Folder
AM572x Product Folder
ASK Our E2E Experts
Design Features
• EtherCAT Class A or Class B Master Stack
According to ETG.1500 Specification
• High-Performance Ethernet Driver for Maximum
EtherCAT Performance
• EtherCAT Feature: Pack Cable Redundancy Using
Two GMAC Ports or Two ICSS_PRU Ports
• EtherCAT Feature: Pack Hot Connect to Support
Flexible Configuration
• PRU-ICSS EMAC Feature: Time-Triggered Send
• Supported Operating System: TI-RTOS
Featured Applications
• EtherCAT Programmable Logic Controller (PLC)
System
• EtherCAT Motion Control Application
• EtherCAT Interface Boards
• EtherCAT Industrial Communication Gateways
剩余18页未读,继续阅读

zyj198
- 粉丝: 1
- 资源: 4
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 27页智慧街道信息化建设综合解决方案.pptx
- 计算机二级Ms-Office选择题汇总.doc
- 单链表的插入和删除实验报告 (2).docx
- 单链表的插入和删除实验报告.pdf
- 物联网智能终端项目设备管理方案.pdf
- 如何打造品牌的模式.doc
- 样式控制与页面布局.pdf
- 武汉理工Java实验报告(二).docx
- 2021线上新品消费趋势报告.pdf
- 第3章 Matlab中的矩阵及其运算.docx
- 基于Web的人力资源管理系统的必要性和可行性.doc
- 基于一阶倒立摆的matlab仿真实验.doc
- 速运公司物流管理模式研究教材
- 大数据与管理.pptx
- 单片机课程设计之步进电机.doc
- 大数据与数据挖掘.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论10