

超声波倒车雷达工作原理、技术现状及发展趋势
Ken.H
一、 概述
倒车雷达系统,英文全称为 REVERSING / PARKING AID
SUBSYSTEM ,BACK SENSOR 或 PACKING SENSOR,英文简称
RPA。
目前被各种轿车特别是高级轿车作为汽车电装品的标准配置或售后的
汽
车电装品主是选配品,例如:德国的奔驰(BENZ),
宝马(BMW),
美
国的别克(BUICK)、通用(GM)、以及日本的日产(NISSAN)、丰 田
(TOYOTA)、本田(HONDA)等均装有倒车雷达系统。
倒车雷达系统测距主要可分为超声波测距、微波雷达测距和激光测
距三种。其中超声波测距(超声波倒车雷达)无论是技术难度还是产品
成本都具有其他两种产品不可比拟的优势,受到了广泛的应用和推广。
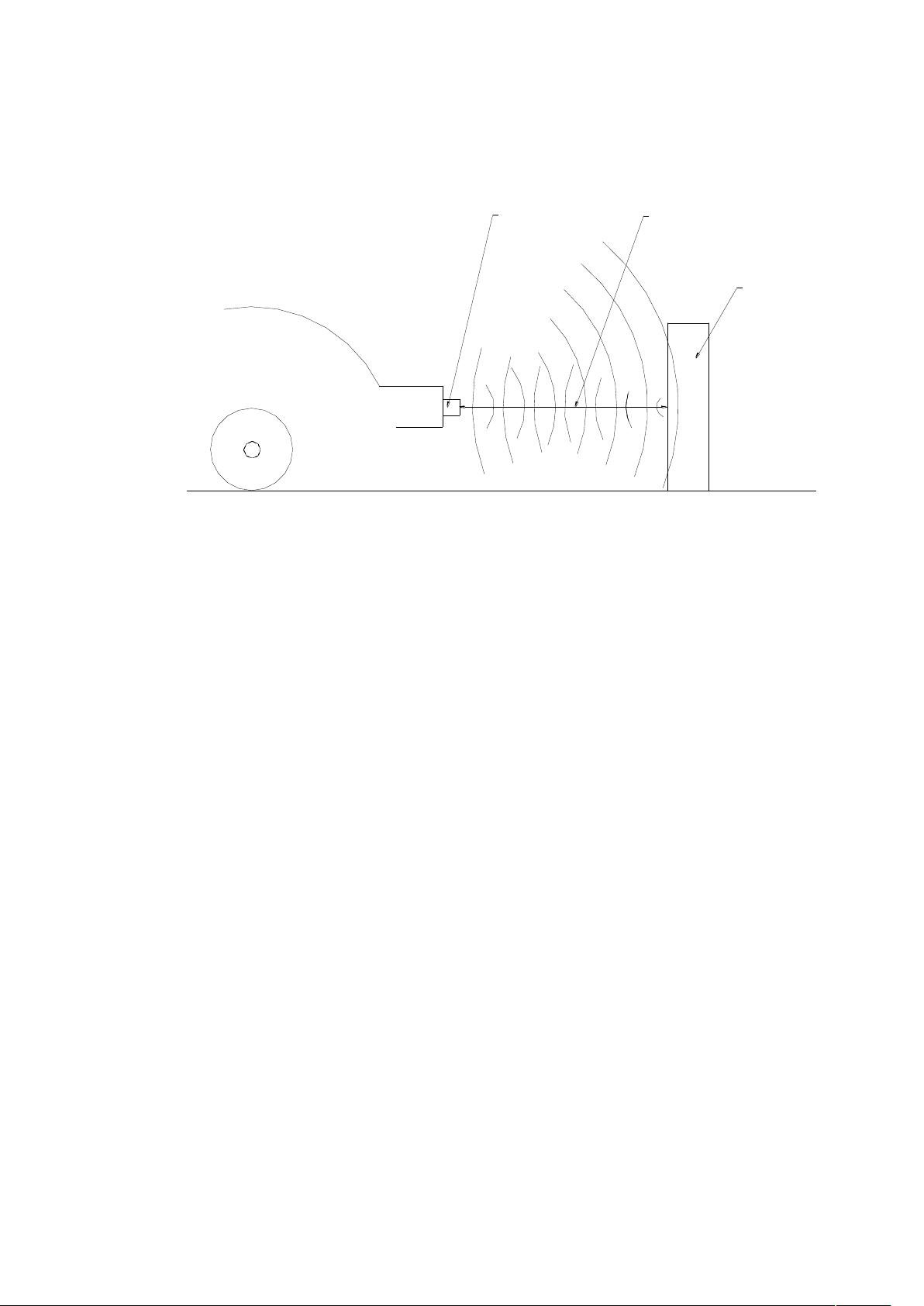
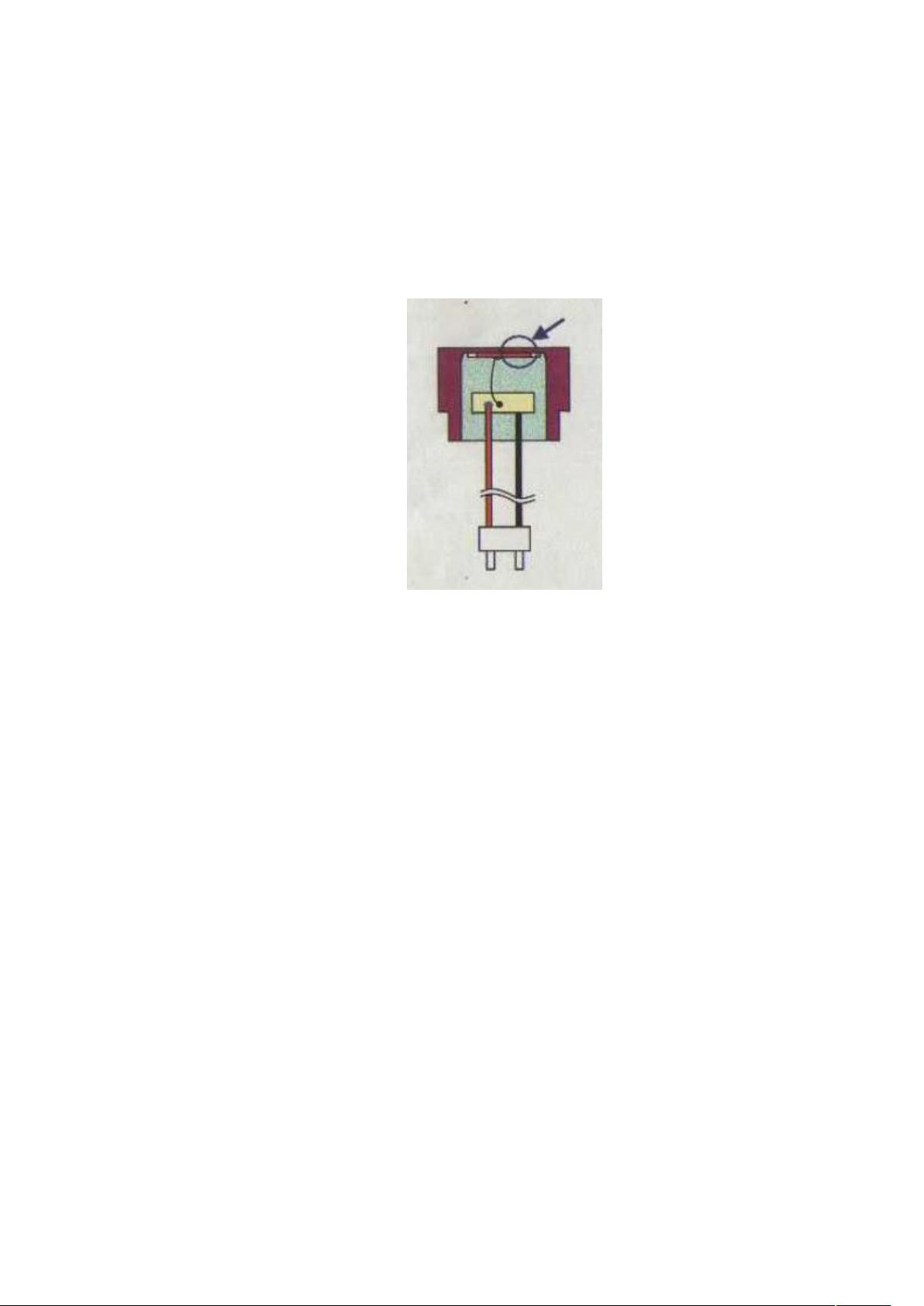
二、 倒车雷达系统的基本原理 倒车雷达系统的基本原理,是利用传感器
内的超声波传感器(俗称探
头)发射出 40KHz 的超声波,由接收探头接收经障碍物反射回来的超声
波,根据超声波反射接收的时间差,由控制单元内的 CPU 处理换算成
距离,并根据系统设定的距离分段发出不同的提示声及显示 (LED 、
LCD、VDF、TFT 等显示器,数码或颜色)提示得知车体到障碍物距离,
使驾驶者轻易避免不必要碰撞。
2-1. 人耳听不到之音波频率之超音波一般定义为 15KHz 以上。
2-2. 音速为 331.4M/秒,此为计算距离、时差的基本公式虽然温湿度变化
时音速会有微小变化,但对短距离使用只有误差几 mm。
2-3. 传感器检测方式为利用超声波(40KHz±2KHz)对对象发射后,有一反
射波经物理原理(入射角=反射角)返回传感器探头,而控制单元利用发射
剩余12页未读,继续阅读

Ceeeeeeeeeeeeeeeeb
- 粉丝: 5
- 资源: 9
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 数据结构1800题含完整答案详解.doc
- 医疗企业薪酬系统设计与管理方案.pptx
- 界面与表面技术界面理论与表面技术要点PPT学习教案.pptx
- Java集合排序及java集合类详解(Collection、List、Map、Set)讲解.pdf
- 网页浏览器的开发 (2).pdf
- 路由器原理与设计讲稿6-交换网络.pptx
- 火电厂锅炉过热汽温控制系统设计.doc
- 企业识别CIS系统手册[收集].pdf
- 物业管理基础知识.pptx
- 第4章财务预测.pptx
- 《集成电路工艺设计及器件特性分析》——实验教学计算机仿真系.pptx
- 局域网内共享文件提示没有访问权限的问题借鉴.pdf
- 第5章网络营销策略.pptx
- 固井质量测井原理PPT教案.pptx
- 毕业实习总结6篇.doc
- UGNX建模基础篇草图模块PPT学习教案.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0