MATLAB与Simulink:自动驾驶功能开发与深度学习案例
需积分: 50 197 浏览量
更新于2023-03-03
9
收藏 5.84MB PDF 举报
本PPT文档深入探讨了如何利用MATLAB和Simulink这一强大的工具组合进行自动驾驶汽车的功能性开发。首先,作者强调了MATLAB和Simulink在自动驾驶系统中的关键角色,包括感知、控制和规划模块。这些模块分别对应于算法中的数据处理、决策制定和行驶路径规划。
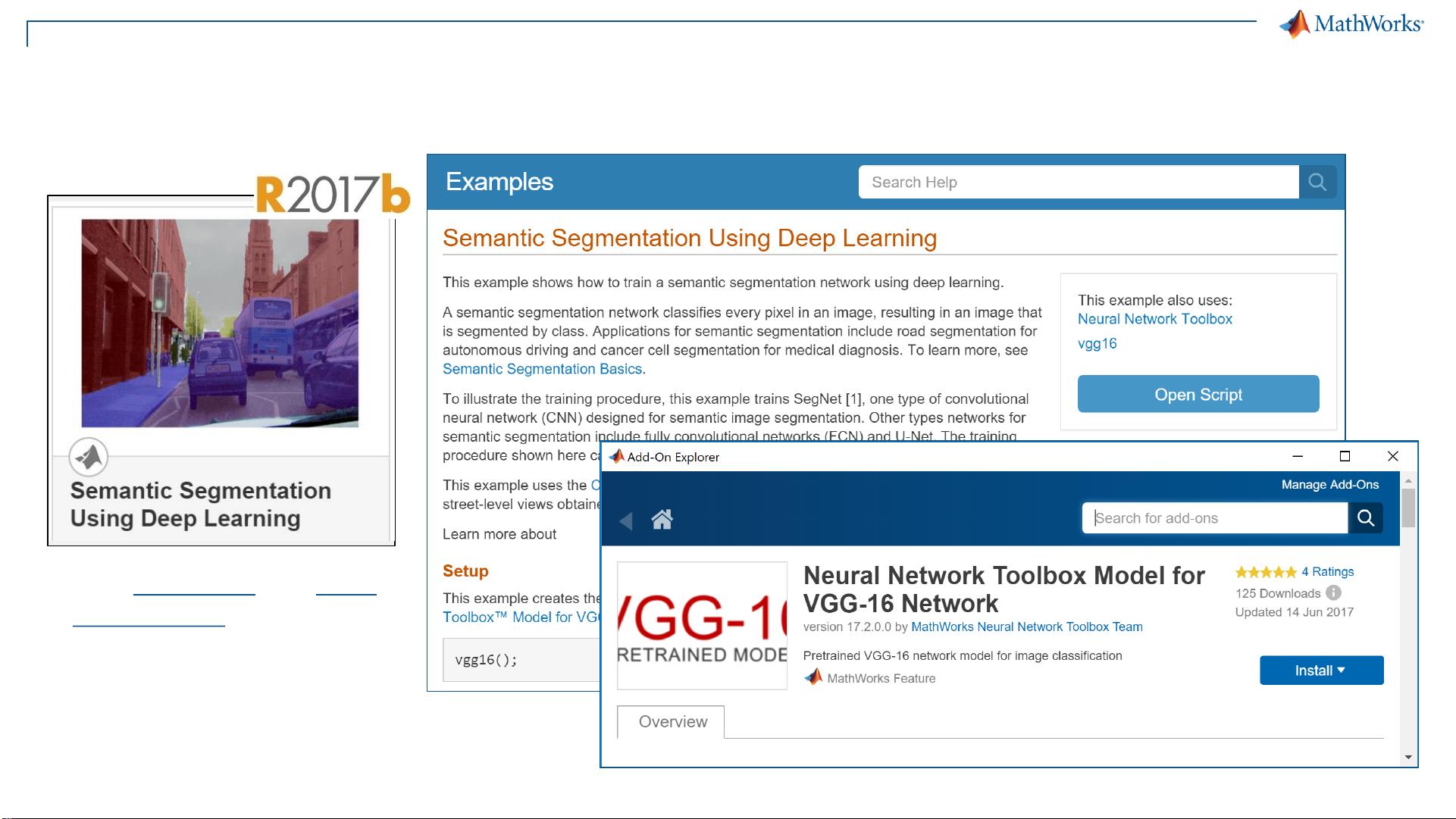
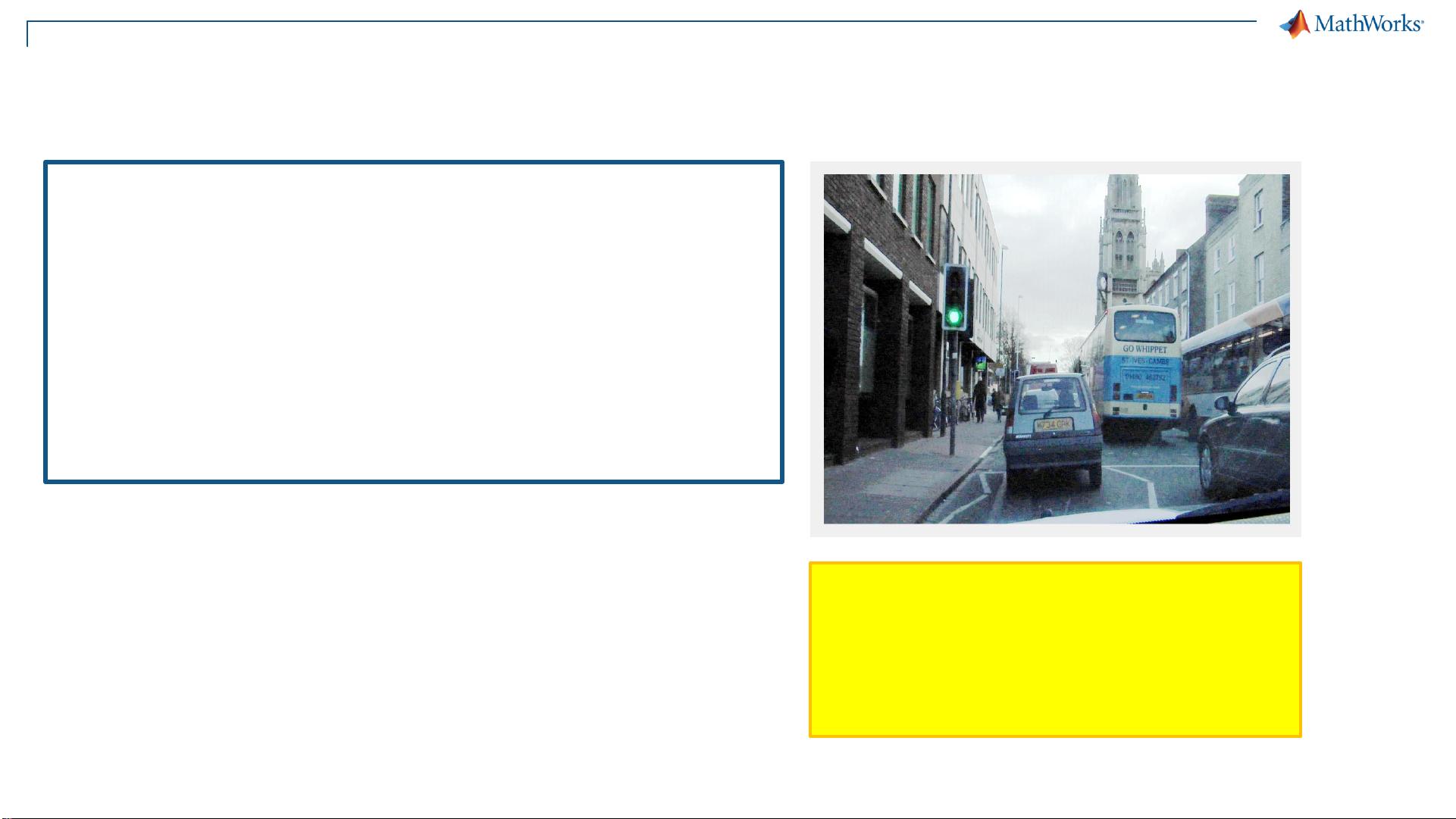
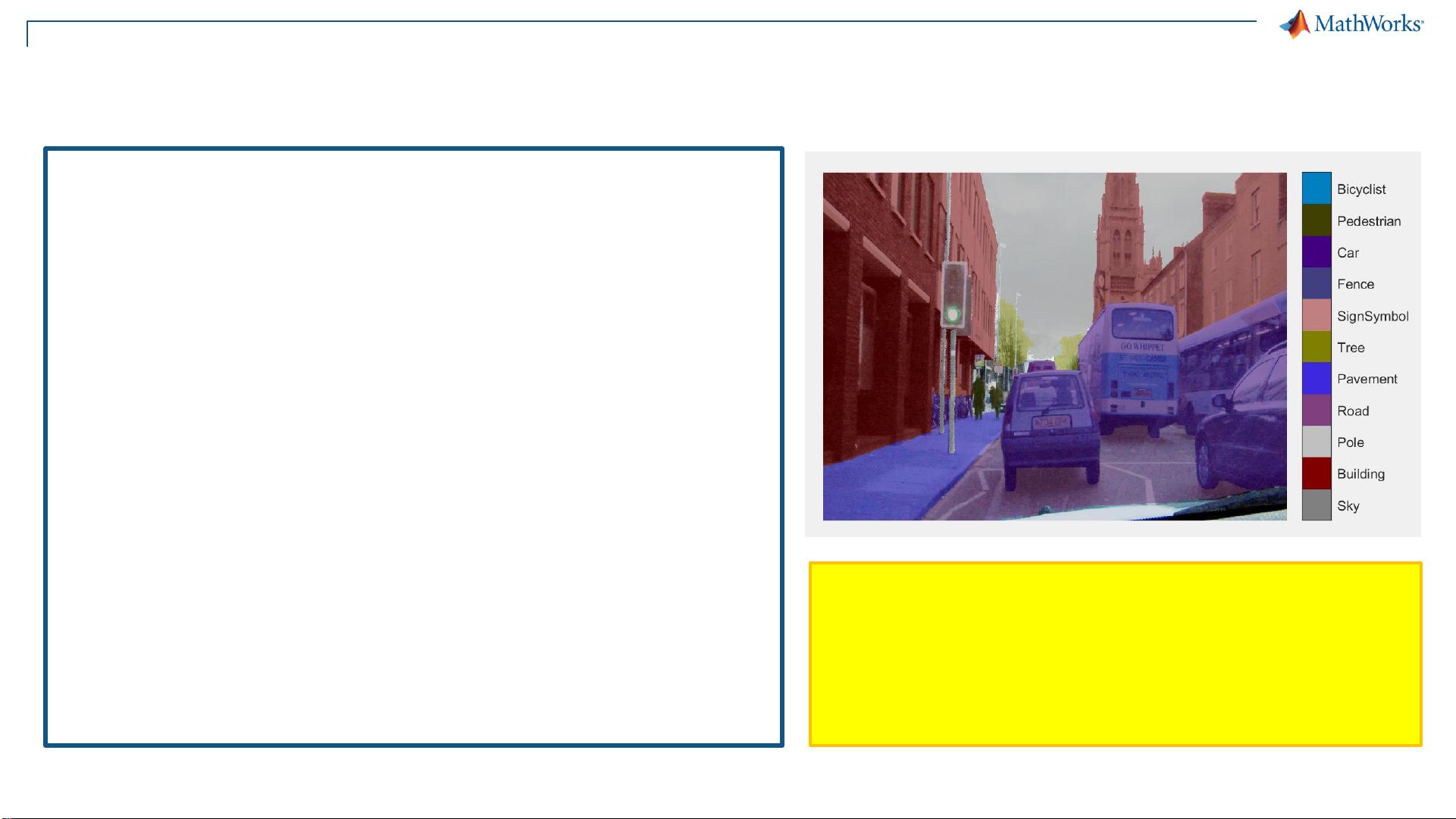
在感知部分,利用深度学习技术来处理传感器收集的数据,如摄像头的图像,实现对周围环境的识别,例如车道线、障碍物、行人和车辆等。传感器建模是另一个重要环节,通过模拟和仿真,可以精确地分析不同传感器的工作原理和性能,为实际应用提供可靠的基础。
规划模块涉及路径规划算法,如模型预测控制,它结合了对未来的预测和即时反馈,确保车辆能安全高效地行驶。同时,MATLAB和Simulink的优势在于它们能够整合实时数据,并通过传感器融合技术优化决策过程。
此外,文档中还介绍了"自动驾驶系统工具箱",这个工具提供了用于标注视频数据的GroundTruthLabeler,使得开发者可以方便地为深度学习模型提供大量标注数据。该工具支持自动化标注车道线和像素点,有助于加快训练过程,特别是针对车道线检测的任务,展示了如何使用Computer Vision System Toolbox训练深度学习网络。
最后,文档通过实际操作演示了如何使用imageDatastore来管理和加载大规模的图像数据集,以及如何在GroundTruthLabeler中进行像素级标注,这对于深度学习模型的训练至关重要。整个开发流程既直观又实用,无论是初学者还是经验丰富的开发者,都能从中获益匪浅。
这份文档为自动驾驶领域的开发者提供了一套完整的基于MATLAB和Simulink的开发框架,涵盖了从数据预处理、算法设计到训练验证的全过程,是构建智能驾驶系统的重要参考资料。
16559 浏览量
228 浏览量
156 浏览量
804 浏览量
190 浏览量
144 浏览量
369 浏览量

挪威的深林
- 粉丝: 226
 我的内容管理
展开
我的内容管理
展开







最新资源
- SAP Business One 敏捷采购操作指南
- C++字符串完全解析:从Win32编码到STL与MFC
- SAP Business One 敏捷财务操作手册
- ASP.NET与Web Service实战解析
- 使用MFC创建动态旋转字体效果
- Jboss EJB3.0入门教程:实例与环境配置详解
- MapXtreme Java开发指南:中文版
- 30分钟快速掌握正则表达式基础
- 重庆科技学院DSP实验全方位指南:从入门到高级应用
- DWR中文教程:JavaScudWiki翻译版
- Java编程基础试题解析
- 改进离散小波变换在彩色图像分割中的应用
- Servlet 2.3规范详解:核心技术与架构介绍
- Windows XP 命令大全
- Struts框架HTML标签库深度解析
- 优化VRP问题的蚁群算法Matlab实现与调优
