UAV/UGV协同环境下的目标识别与全局路径规划研究协同环境下的目标识别与全局路径规划研究
针对单独机器人难以执行复杂环境中任务的问题,Unmanned Air/Ground Vehicle(UAV/UGV)协同系统近年来受
到了广泛关注。为了提高执行任务的工作效率,提出一种基于视觉传感器下UAV/UGV协同系统中UAV目标识别
下UGV全局路径规划的方法,无人机利用高空视野优势获取目标物与环境信息, SURF算法和图像分割实现环境
建模。无人车根据无人机获取的信息,利用优化的A*算法完成全局路径规划,并且在典型搜救场景中进行了仿
真验证。实验表明,SURF算法能满足目标识别的精确度、实时性和鲁棒性;并且利用优化的A*算法实现了
UGV快速准确的全局路径规划。
0 引言引言
单独的无人机(UAV)与单独的无人车(UGV)在工作方式、搭载传感器等方面存在显著不同,在感知、负载、速度、视野获取
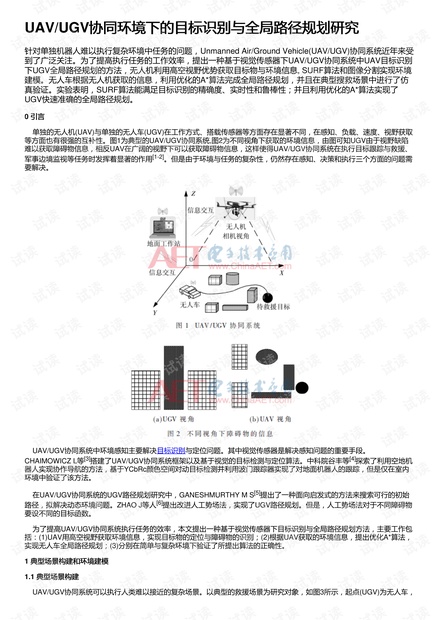
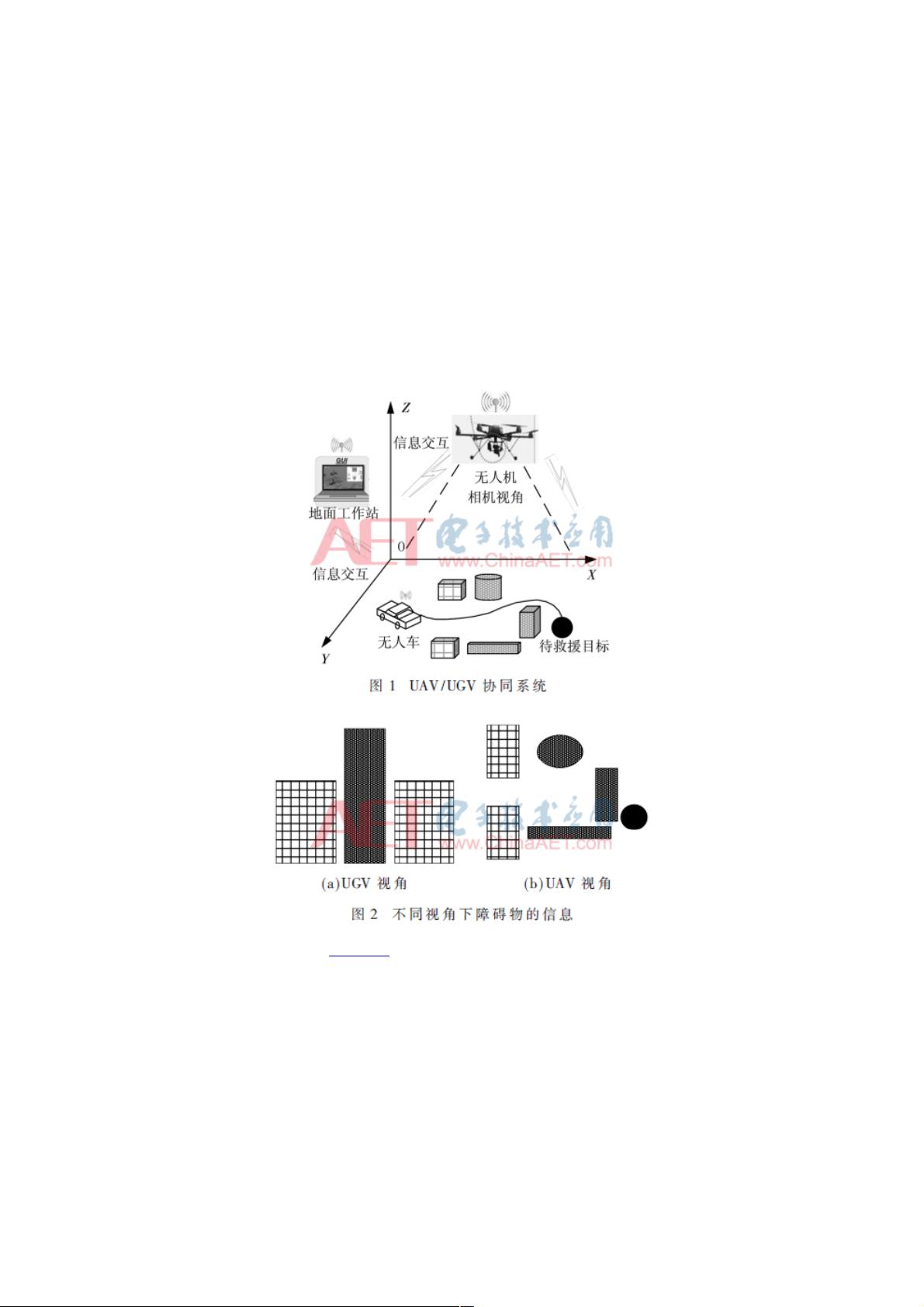
等方面也有很强的互补性。图1为典型的UAV/UGV协同系统,图2为不同视角下获取的环境信息,由图可知UGV由于视野缺陷
难以获取障碍物信息,相反UAV在广阔的视野下可以获取障碍物信息,这样使得UAV/UGV协同系统在执行目标跟踪与救援、
军事边境监视等任务时发挥着显著的作用
[1-2]
。但是由于环境与任务的复杂性,仍然存在感知、决策和执行三个方面的问题需
要解决。
UAV/UGV协同系统中环境感知主要解决目标识别与定位问题。其中视觉传感器是解决感知问题的重要手段。
CHAIMOWICZ L等
[3]
搭建了UAV/UGV协同系统框架以及基于视觉的目标检测与定位算法。中科院谷丰等
[4]
探索了利用空地机
器人实现协作导航的方法,基于YCbRc颜色空间对动目标检测并利用波门跟踪器实现了对地面机器人的跟踪,但是仅在室内
环境中验证了该方法。
在UAV/UGV协同系统的UGV路径规划研究中,GANESHMURTHY M S
[5]
提出了一种面向启发式的方法来搜索可行的初始
路径,拟解决动态环境问题。ZHAO J等人
[6]
提出改进人工势场法,实现了UGV路径规划。但是,人工势场法对于不同障碍物
要设不同的目标函数。
为了提高UAV/UGV协同系统执行任务的效率,本文提出一种基于视觉传感器下目标识别与全局路径规划方法,主要工作包
括:(1)UAV用高空视野获取环境信息,实现目标物的定位与障碍物的识别;(2)根据UAV获取的环境信息,提出优化A*算法,
实现无人车全局路径规划;(3)分别在简单与复杂环境下验证了所提出算法的正确性。
1 典型场景构建和环境建模典型场景构建和环境建模
1.1 典型场景构建典型场景构建
UAV/UGV协同系统可以执行人类难以接近的复杂场景。以典型的救援场景为研究对象,如图3所示,起点(UGV)为无人车,

weixin_38703906
- 粉丝: 4
- 资源: 935
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 2023年中国辣条食品行业创新及消费需求洞察报告.pptx
- 2023年半导体行业20强品牌.pptx
- 2023年全球电力行业评论.pptx
- 2023年全球网络安全现状-劳动力资源和网络运营的全球发展新态势.pptx
- 毕业设计-基于单片机的液体密度检测系统设计.doc
- 家用清扫机器人设计.doc
- 基于VB+数据库SQL的教师信息管理系统设计与实现 计算机专业设计范文模板参考资料.pdf
- 官塘驿林场林防火(资源监管)“空天地人”四位一体监测系统方案.doc
- 基于专利语义表征的技术预见方法及其应用.docx
- 浅谈电子商务的现状及发展趋势学习总结.doc
- 基于单片机的智能仓库温湿度控制系统 (2).pdf
- 基于SSM框架知识产权管理系统 (2).pdf
- 9年终工作总结新年计划PPT模板.pptx
- Hytera海能达CH04L01 说明书.pdf
- 数据中心运维操作标准及流程.pdf
- 报告模板 -成本分析与报告培训之三.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论5