

基于多传感器融合的多城市场景高精确车辆定位
摘要
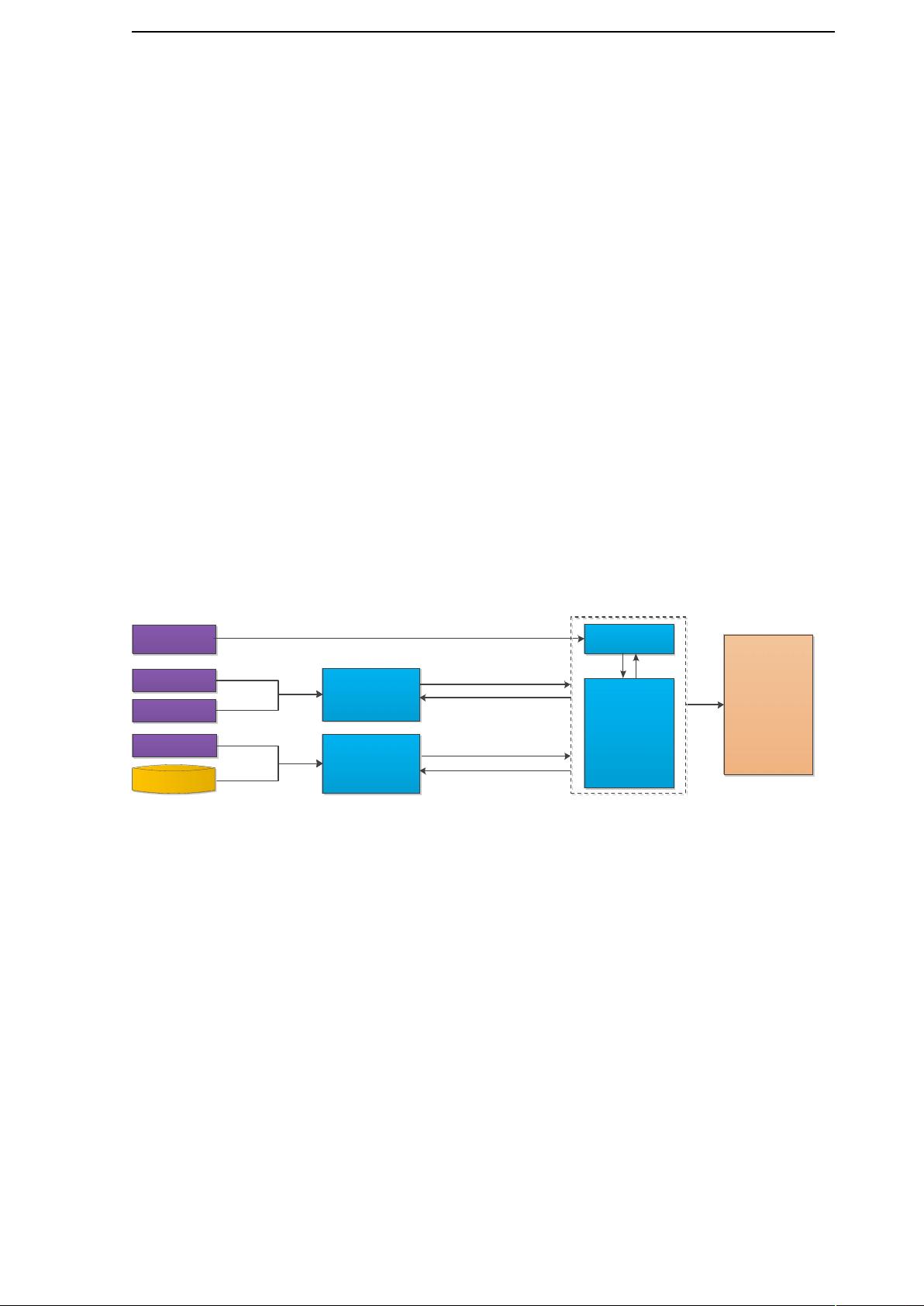
本文提出了一种在不同城市场景中实现厘米级定位精度的稳定精确的定位系统。
我们的系统自适应地使用来自互补传感器(如全球导航卫星系统,激光雷达,惯性测
量单元)的信息,从而实现在具有挑战性的场景(如市区,高速公路和隧道)下达到
高精度定位和适应能力。我们不再仅仅依靠激光雷达强度或三维几何,还创造性地利
用激光雷达强度和高度提示,显著提高定位系统的精度和鲁棒性。我们的全球导航卫
星系统-载波相位差分技术模块利用了多传感器融合框架,实现了更高的模糊度解算成
功率。应用误差状态下的卡尔曼滤波器将不同源的定位测量数据与新的不确定度评定
进行融合。我们详细验证了该方法的有效性,实现了 5-10cm 的均方根误差精度,并
优于现有的最先进系统。重要的是,当我们的系统部署在大型自动驾驶平台上时,能
够使我们的车辆在拥挤的城市街道上完全自主,尽管道路施工时有发生。我们使用的
数据集包括在各种城市道路上行驶超过 60 公里的实际交通量,用于全面测试我们的系



剩余26页未读,继续阅读

weixin_43886795
- 粉丝: 0
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- RTL8188FU-Linux-v5.7.4.2-36687.20200602.tar(20765).gz
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0