
基于基于stm32的两轮自平衡小车的两轮自平衡小车1(模块选型篇)(模块选型篇)
有一段时间没有更新博客了,最近一段时间都在忙毕业和实习,闲暇的时候也在学习怎么写公众号推文,实在惭愧。毕业设计做的是平有一段时间没有更新博客了,最近一段时间都在忙毕业和实习,闲暇的时候也在学习怎么写公众号推文,实在惭愧。毕业设计做的是平
衡小车,这几天某宝买的器件还不知所踪,新的衡小车,这几天某宝买的器件还不知所踪,新的PCB电路板又不想画,所以在想要不把做过的过程回顾一次,以后好写论文。该项目会电路板又不想画,所以在想要不把做过的过程回顾一次,以后好写论文。该项目会
分分“模块选型篇模块选型篇”、、“原理篇原理篇”、、“硬件篇硬件篇”和和“软件调试篇软件调试篇”(立好(立好flag,希望自己能好好完成)。由于博主水平有限,都是自己网上找资料,希望自己能好好完成)。由于博主水平有限,都是自己网上找资料
找代码学习的,如果有地方描述不清晰,请各位大佬指正或者与我一同讨论。想获取源码吗?去我的简介找找代码学习的,如果有地方描述不清晰,请各位大佬指正或者与我一同讨论。想获取源码吗?去我的简介找“于此生于此生”吧,我把一切都放吧,我把一切都放
在那里了。在那里了。
这里先列出平衡小车的模块组成。平衡小车的模块组成比较简单,主要包含以下模块:
主控模块主控模块
电机驱动模块电机驱动模块
MPU6050模块模块
蓝牙通信模块蓝牙通信模块
降压模块降压模块
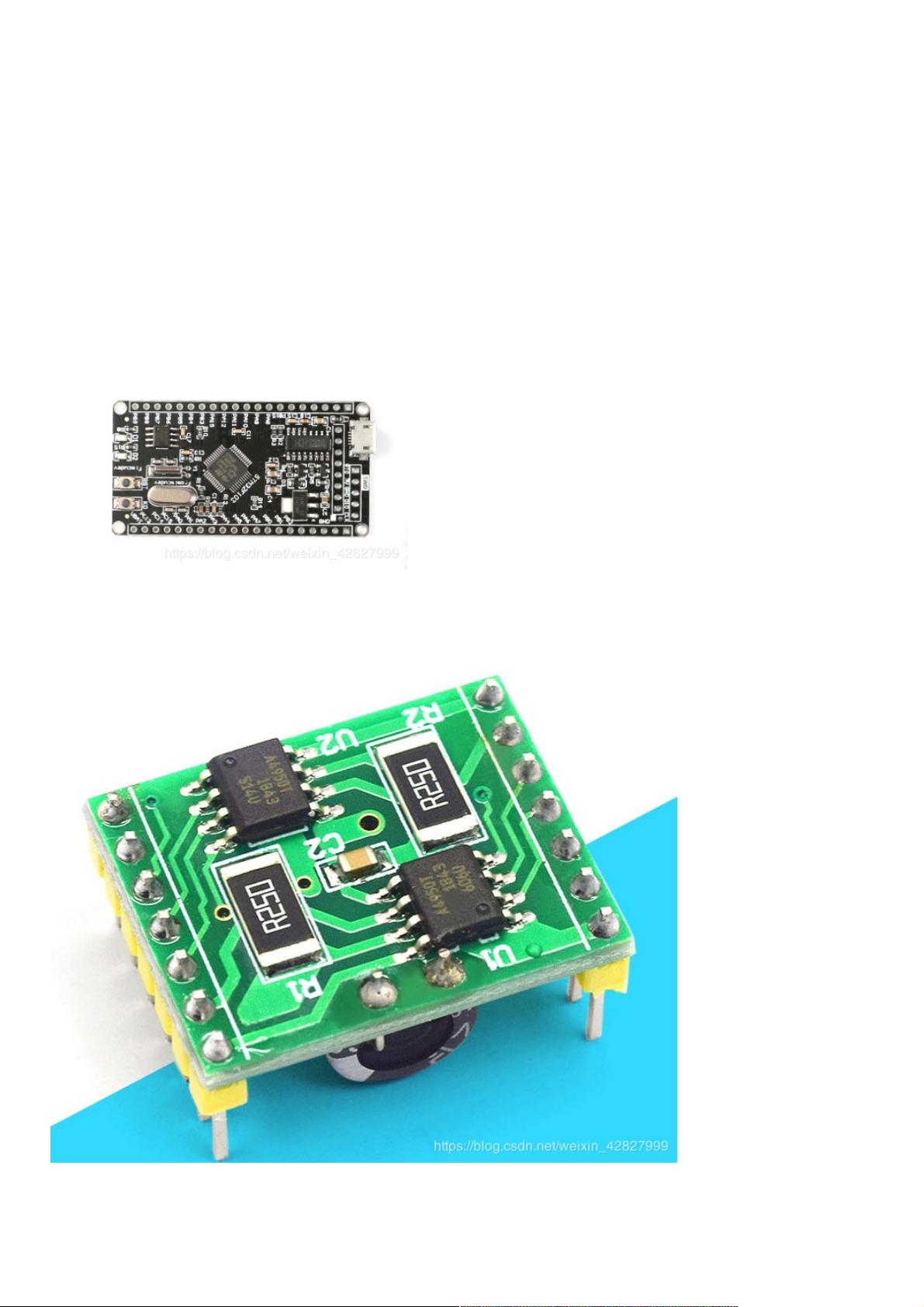
主控模块:主控模块:
主控模块选择的是stm32f103c8t6,一块比较通用的模块,功能也比较强大,我这块主控板是在某宝买的,自带1.44寸TFT-LCD显示屏
接口,方便调试,如图所示:
该核心板体积较小,它的主频是72MHz,48个管脚,内部有三路通用定时器和一路高级定时器,并带有3路串口和两路IIC/SPI输出,用
来做平衡小车的主控是合格的。
电机驱动模块电机驱动模块
电机驱动模块选择的是A4950模块。该模块上集成两个A4950芯片,单芯片内部集成MOS全桥电路,可以使用一个芯片控制电机的正反
转。如下图所示:
这种电机驱动模块的用法类似于L298N,也是四路IN PWM输入、四路OUT输出,其驱动电压为7.6V-40V,。当初选择这个模块就因为
某宝店家里的宣传:“性能远超TB6612”…说实话,用起来确实还不错的。
MPU6050模块模块
众所周知平衡小车是靠两个轮子晃来晃去…来保持平衡的,即小车有向一边倒下的趋势的时候就马上向倒下那一边加速,小车向一边倾
斜的时候会出现一个倾角,那个获取这个倾角对于保持平衡来说至关重要。这里选用MPU6050传感器模块来获取平衡倾角,如下图所

weixin_38642285
- 粉丝: 5
- 资源: 948
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 2023年中国辣条食品行业创新及消费需求洞察报告.pptx
- 2023年半导体行业20强品牌.pptx
- 2023年全球电力行业评论.pptx
- 2023年全球网络安全现状-劳动力资源和网络运营的全球发展新态势.pptx
- 毕业设计-基于单片机的液体密度检测系统设计.doc
- 家用清扫机器人设计.doc
- 基于VB+数据库SQL的教师信息管理系统设计与实现 计算机专业设计范文模板参考资料.pdf
- 官塘驿林场林防火(资源监管)“空天地人”四位一体监测系统方案.doc
- 基于专利语义表征的技术预见方法及其应用.docx
- 浅谈电子商务的现状及发展趋势学习总结.doc
- 基于单片机的智能仓库温湿度控制系统 (2).pdf
- 基于SSM框架知识产权管理系统 (2).pdf
- 9年终工作总结新年计划PPT模板.pptx
- Hytera海能达CH04L01 说明书.pdf
- 数据中心运维操作标准及流程.pdf
- 报告模板 -成本分析与报告培训之三.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0