

Factor Graphs and GTSAM:
A Hands-on Introduction
Frank Dellaert
Technical Report number GT-RIM-CP&R-2012-002
September 2012
Overview
In this document I provide a hands-on introduction to both factor graphs and GTSAM.
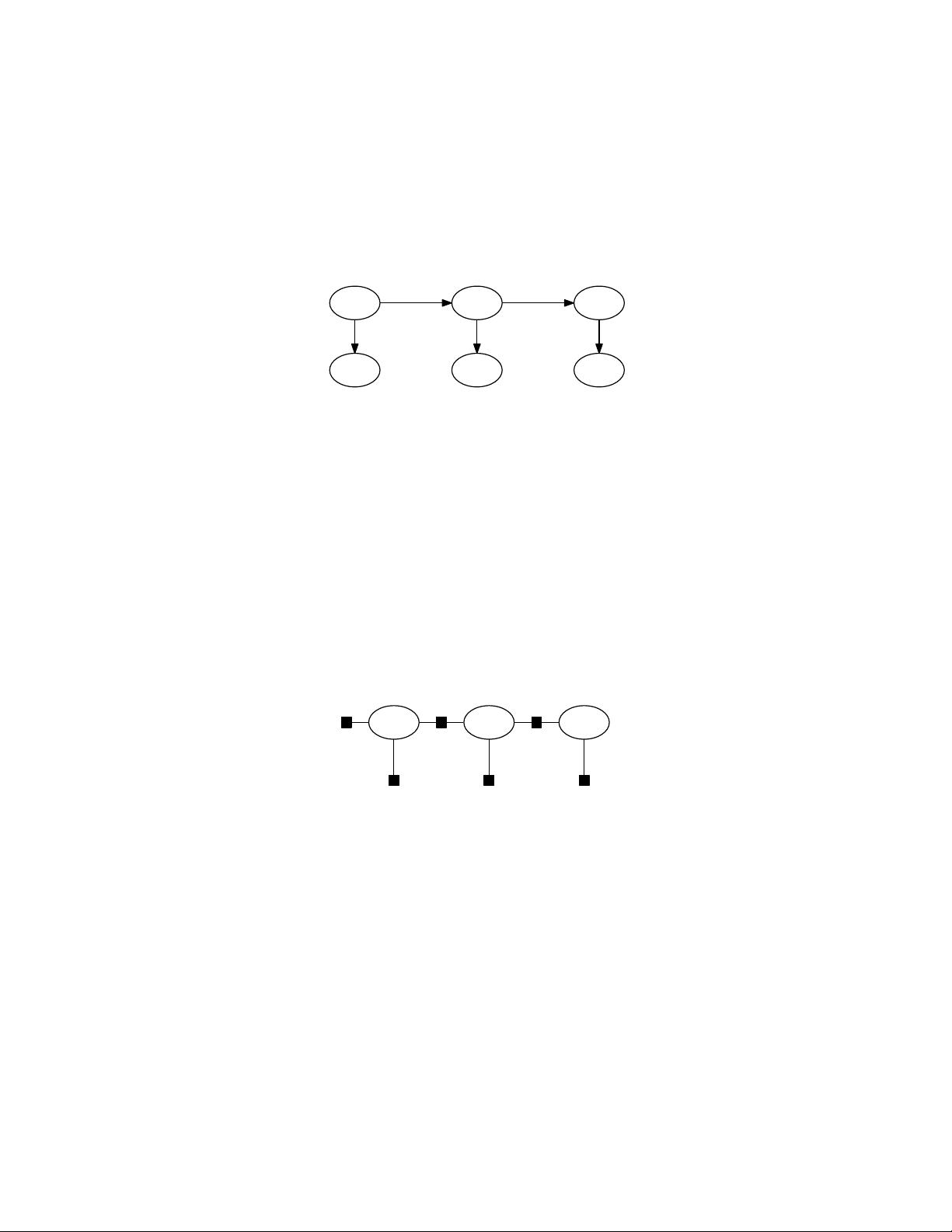
Factor graphs are graphical models (Koller and Friedman, 2009) that are well suited to mod-
eling complex estimation problems, such as Simultaneous Localization and Mapping (SLAM) or
Structure from Motion (SFM). You might be familiar with another often used graphical model,
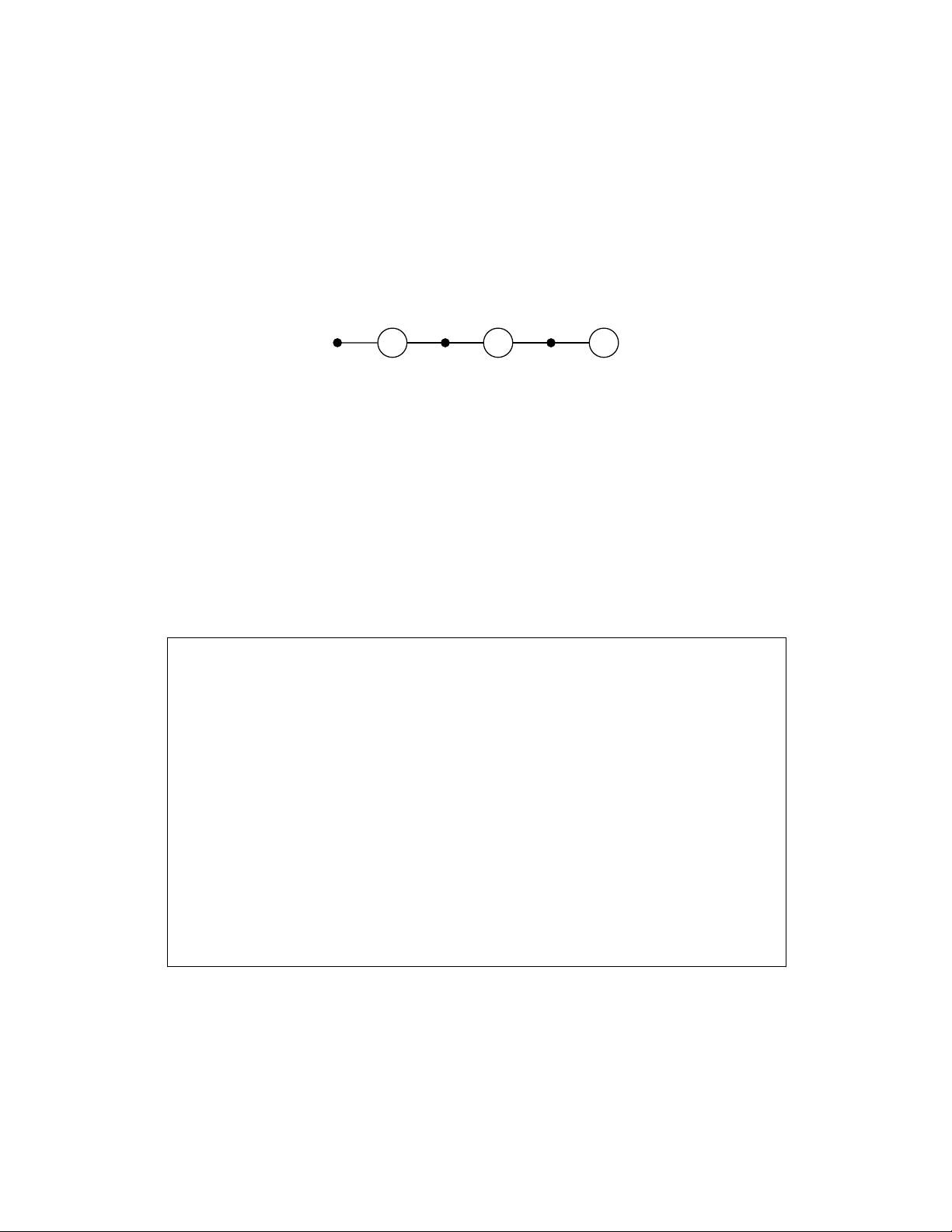
Bayes networks, which are directed acyclic graphs. A factor graph, however, is a bipartite graph
consisting of factors connected to variables. The variables represent the unknown random vari-
ables in the estimation problem, whereas the factors represent probabilistic information on those
variables, derived from measurements or prior knowledge. In the following sections I will show
many examples from both robotics and vision.
The GTSAM toolbox (GTSAM stands for “Georgia Tech Smoothing and Mapping”) toolbox is
a BSD-licensed C++ library based on factor graphs, developed at the Georgia Institute of Technol-
ogy by myself, many of my students, and collaborators. It provides state of the art solutions to the
SLAM and SFM problems, but can also be used to model and solve both simpler and more com-
plex estimation problems. It also provides a MATLAB interface which allows for rapid prototype
development, visualization, and user interaction.
GTSAM exploits sparsity to be computationally efficient. Typically measurements only provide
information on the relationship between a handful of variables, and hence the resulting factor graph
will be sparsely connected. This is exploited by the algorithms implemented in GTSAM to reduce
computational complexity. Even when graphs are too dense to be handled efficiently by direct
methods, GTSAM provides iterative methods that are quite efficient regardless.
You can download the latest version of GTSAM at http://tinyurl.com/gtsam.
1


剩余26页未读,继续阅读

yariel
- 粉丝: 8
- 资源: 3
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
- MW全能培训汽轮机调节保安系统PPT教学课件.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0