
一款基于一款基于STM32的智能灭火机器人设计的智能灭火机器人设计
本文以STM32F103嵌入式芯片为核心,完成灭火机器人的软、硬件设计。当机器人启动后,前部和左右的红外
测距传感器为机器人的避障功能和沿墙走方式提供参考信号。
引 言
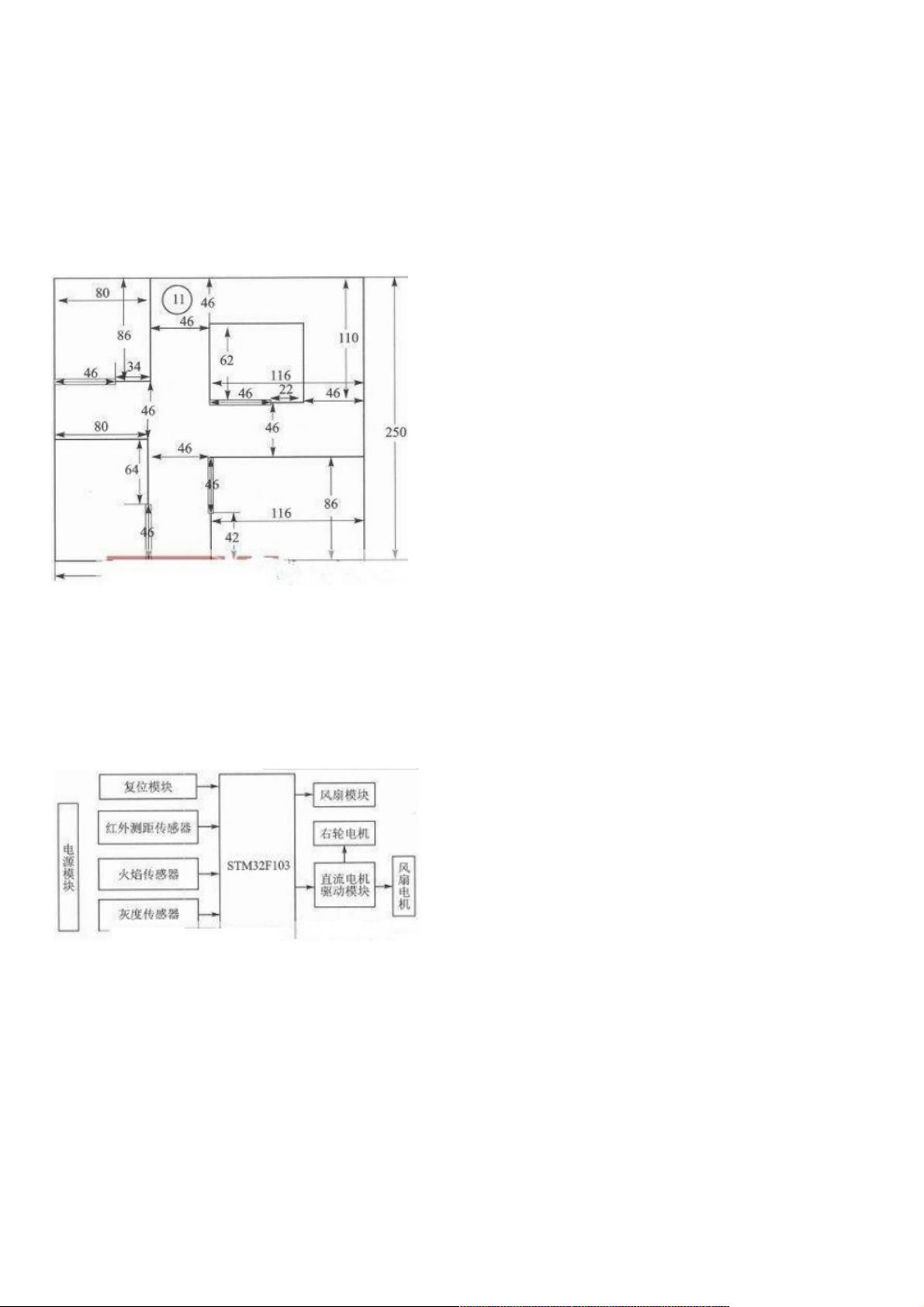
本设计的研究初衷来源于灭火机器人比赛,比赛场地将采用国际标准比赛场地,比赛场地平面图如图1所示。比赛场地的墙壁
高为33cm,厚为2 cm,由木头做成。墙壁刷成白色。比赛场地的地板是被漆成黑色的光滑木制板。场地中所有的走廊和门口
都是46 cm的开口,一个白色的2.5 cm宽的白色带子或白漆印迹表示房间人口,在距离火焰30 cm的圆上有一条2.5 cm宽的白
线。根据要求,该机器人要在模拟的四室一厅房间内完成发现并确认火源、灭火和回家(回到出发点H)等功能。
本文以STM32F103嵌入式芯片为核心,完成灭火机器人的软、硬件设计。当机器人启动后,前部和左右的红外测距传感器为
机器人的避障功能和沿墙走方式 提供参考信号。机器人的运动速度以及运动方向由处理器输出的PWM信号来控制。火焰传感
器检测房间内火源,发现火源后机器人朝向火源方向行走,底部的灰度 传感器检测地面白线判断机器人是否靠近火源,控制
机器人暂停,启动风扇灭火,灭火后回家。
1 系统硬件设计
根据设计要求,本系统主要由STM32F103、传感器模块、直流电机驱动模块、风扇模块、电源模块等构成。系统框图如图2
所示。
1.1 机器人整体布局
机器人左右两轮分别用两个转速和力矩完全相同的直流电机进行驱动,机器人前部装一个万向轮,这样,可以轻松地使机器人
改变运行方向和运动速度。机器人前面装有风扇、火焰传感器和红外传感器,头部底侧装有灰度传感器,左右两侧各有3个红
外测距传感器,两侧的传感器可以分别测量不同范围内的障碍物距离。
1.2微控制器模块
系统传感器模块要不断采集环境信息,要求控制芯片有较高的实时处理能力和较高的处理速度,因此,系统选用嵌入式芯片
STM32F103该芯片使用ARM先进架构的Cortex—M3内核,CPU频率可达72 MHz,具有两个16位ADC用于高速采集数据采
集,15个I/O端口用于连接外部设备。I/O端口作为输入口读取检测端口和传感器组的数据,作为输出端口用于驱动电机和风
扇。4个PWM定时器用于驱动大功率直流电机。芯片具有速度快、功耗低、可靠性高、实时性强等优点。
1.3 传感器模块
传感器模块主要由红外测距传感器、火焰传感器和灰度传感器三类组成。
红外测距传感器主要检测障碍物(墙壁),防止机器人撞墙。本设计采用光电式红外传感器E18-D80NK,它是集红外发射模

weixin_38571544
- 粉丝: 3
- 资源: 895
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 数据结构1800题含完整答案详解.doc
- 医疗企业薪酬系统设计与管理方案.pptx
- 界面与表面技术界面理论与表面技术要点PPT学习教案.pptx
- Java集合排序及java集合类详解(Collection、List、Map、Set)讲解.pdf
- 网页浏览器的开发 (2).pdf
- 路由器原理与设计讲稿6-交换网络.pptx
- 火电厂锅炉过热汽温控制系统设计.doc
- 企业识别CIS系统手册[收集].pdf
- 物业管理基础知识.pptx
- 第4章财务预测.pptx
- 《集成电路工艺设计及器件特性分析》——实验教学计算机仿真系.pptx
- 局域网内共享文件提示没有访问权限的问题借鉴.pdf
- 第5章网络营销策略.pptx
- 固井质量测井原理PPT教案.pptx
- 毕业实习总结6篇.doc
- UGNX建模基础篇草图模块PPT学习教案.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0