
粒子群算法(1)----粒子群算法简介
一、粒子群算法的历史
粒子群算法源于复杂适应系统(Complex Adaptive System,CAS)。CAS 理论于 1994 年正式提出,CAS 中的
成员称为主体。比如研究鸟群系统,每个鸟在这个系统中就称为主体。主体有适应性,它能够与环境及其他的主体进
行交流,并且根据交流的过程“学习”或“积累经验”改变自身结构与行为。整个系统的演变或进化包括:新层次的产生
(小鸟的出生);分化和多样性的出现(鸟群中的鸟分成许多小的群);新的主题的出现(鸟寻找食物过程中,不断
发现新的食物)。
所以 CAS 系统中的主体具有 4 个基本特点(这些特点是粒子群算法发展变化的依据):
首先,主体是主动的、活动的。
主体与环境及其他主体是相互影响、相互作用的,这种影响是系统发展变化的主要动力。
环境的影响是宏观的,主体之间的影响是微观的,宏观与微观要有机结合。
最后,整个系统可能还要受一些随机因素的影响。
粒子群算法就是对一个 CAS 系统---鸟群社会系统的研究得出的。
粒子群算法( Particle Swarm Optimization, PSO)最早是由 Eberhart 和 Kennedy 于 1995 年提出,它的基本概
念源于对鸟群觅食行为的研究。设想这样一个场景:一群鸟在随机搜寻食物,在这个区域里只有一块食物,所有的鸟都
不知道食物在哪里,但是它们知道当前的位置离食物还有多远。那么找到食物的最优策略是什么呢?最简单有效的就
是搜寻目前离食物最近的鸟的周围区域。
PSO 算法就从这种生物种群行为特性中得到启发并用于求解优化问题。在 PSO 中,每个优化问题的潜在解都可
以想象成 d 维搜索空间上的一个点,我们称之为“粒子”(Particle),所有的粒子都有一个被目标函数决定的适应值
(Fitness Value ),每个粒子还有一个速度决定他们飞翔的方向和距离,然后粒子们就追随当前的最优粒子在解空间中
搜索。Reynolds 对鸟群飞行的研究发现。鸟仅仅是追踪它有限数量的邻居但最终的整体结果是整个鸟群好像在一个
中心的控制之下.即复杂的全局行为是由简单规则的相互作用引起的。
二、粒子群算法的具体表述
上面罗嗦了半天,那些都是科研工作者写论文的语气,不过,PSO 的历史就像上面说的那样。下面通俗的解释
PSO 算法。
PSO 算法就是模拟一群鸟寻找食物的过程,每个鸟就是 PSO 中的粒子,也就是我们需要求解问题的可能解,这
些鸟在寻找食物的过程中,不停改变自己在空中飞行的位置与速度。大家也可以观察一下,鸟群在寻找食物的过程中,
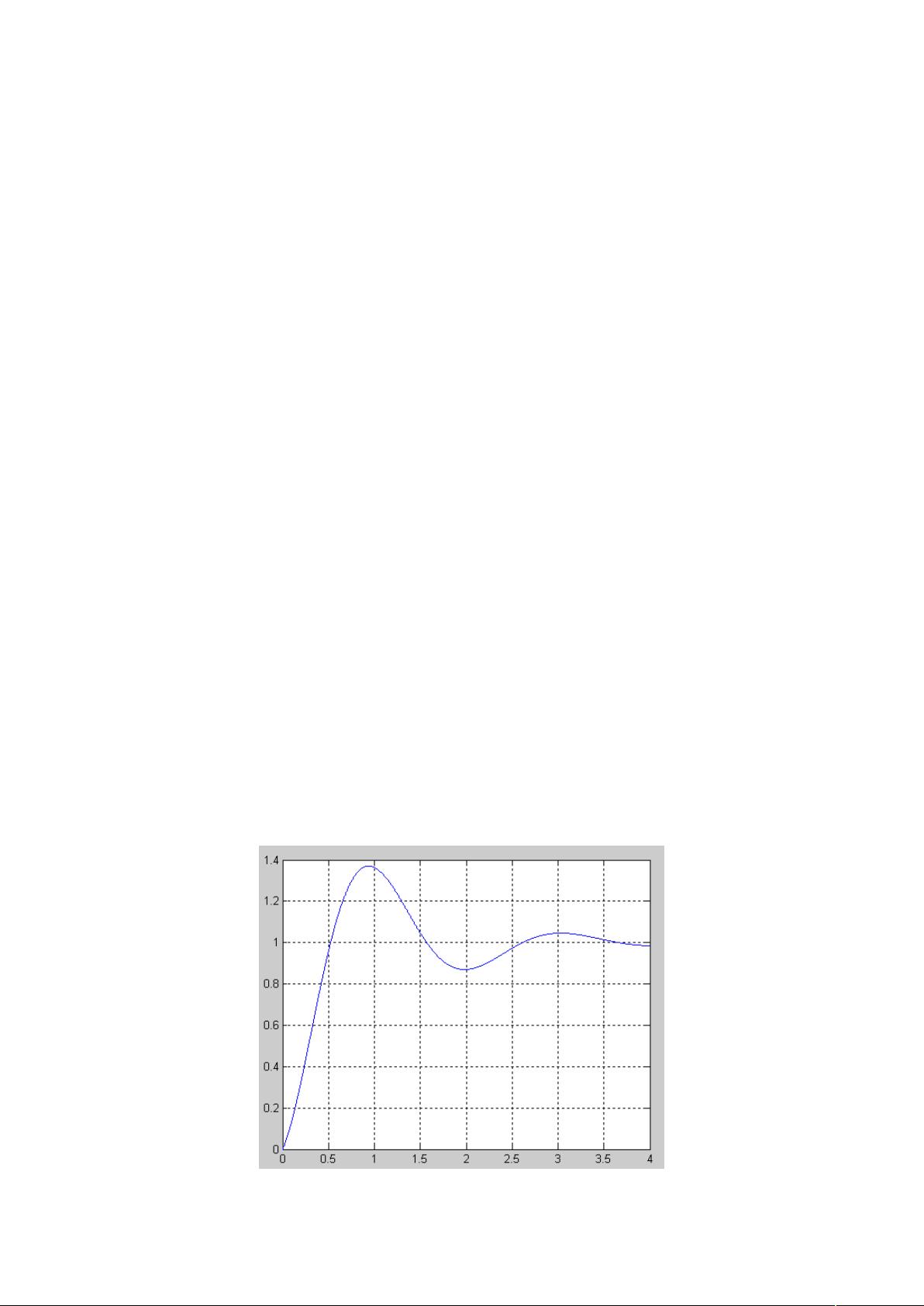
开始鸟群比较分散,逐渐这些鸟就会聚成一群,这个群忽高忽低、忽左忽右,直到最后找到食物。这个过程我们转化
为一个数学问题。寻找函数 y=1-cos(3*x)*exp(-x)的在[0,4]最大值。该函数的图形如下:


剩余21页未读,继续阅读

jason19821201
- 粉丝: 1
- 资源: 3
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- zigbee-cluster-library-specification
- JSBSim Reference Manual
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论6