
非抢占式调度算法的实现非抢占式调度算法的实现(非抢占式、不可剥夺式)非抢占式、不可剥夺式)
非抢占式调度算法的实现(非抢占式、不可剥夺式) 时间如冲冲流水,一转眼间都毕业快一年了。这一年里忙忙
碌碌,却又碌碌无为。有时又总想,生亦何苦,死亦何哀。之前做了个STM8的脱机编程器,使用了EMWIN,
学习到了人家的消息机制。觉得自己编程在无法移植系统的情况下能不能自己设计个模块呢?就有了标题中的
思想。
以下是我在论坛上发的。
今天我也来个凑热闹讲讲操作系统,理论嘛,人人都懂,所以不讲了。
首先想问大家,平时在8位机上会用到操作系统吗?还是一直都是裸奔?当然了我一直都是在祼奔。
背景:
为什么要装B还说要设计个OS,这么简单还不人人都去设计。事实也的确如此,难。不知道各位有没有遇到这样的情况:
给公司写软件的时候,其核心内容设计好后公司总会有一些需要特别功能的产品,但仍基于设计好的核心,因此需要将此
COPY两份,在其中一份中增加功能。如果公司这样的产品较多,那么你的文件夹中出现各种复件,如果核心软件优化了将对
所有文件全部一一优化。自然有人说可以有预处理指令来增加功能模块,但这样的代码还是难于维护。。
重点来了,当软件初步完成后,维护时往往并没有设计时的激情,一是并没有设计时的思路,二总想换个思路重新写,或者压
根就不想再碰!我是这样的,你呢?
因此我一直在找基于8位机的RTOS。
再后来我使用了EMWIN设计了一个产品,它的消息机制真的很棒,我就想能不能通过消息来驱动任务。emwin的消息是针对
窗口对象的。我只要将各个任务看作对象不也应该可以设计么?针对这样的想法就开始了设计之路。
===============================================================
____:初步想法:
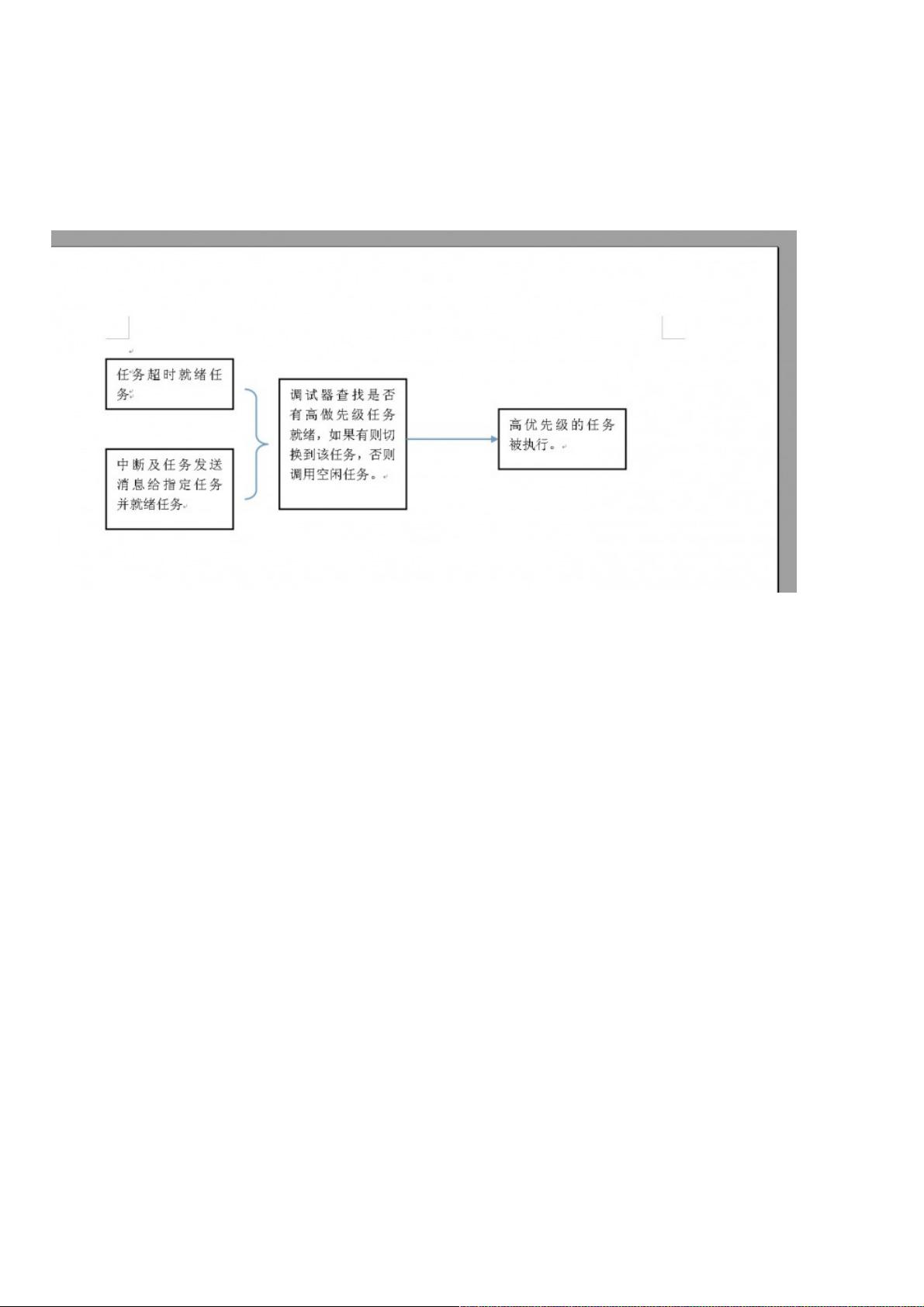
给每个任务建立一个消息池,任务等待消息,等到消息后执行该任务。消息由其它任务或中断中给出。
____:又来了想法:
如果同时有任务等到消息到底谁先运行,所以在任务中建立优先级,以使同时等到消息的任务中优先级高的得到CPU的使用
权?
那么这样就得有一个调度器,在任务间进行切换。
为此我给每个函数统一名称叫消息进程,以MP_xxx开头。
即然用到优先级就会想到ucos中优先级查找机制,翻开ucos的书,其中一段让我的想法步入了正轨——不可剥夺型内核。
____: 什么是非抢占式优先级调度操作系统也叫不可剥夺型内核(来自ucosii ……)


剩余11页未读,继续阅读

weixin_38695471
- 粉丝: 3
- 资源: 911
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 面 向 对 象 课 程 设 计(很详细)
- 复杂可编程逻辑器件ppt课件.ppt
- 2021.12-2021居住客群消费趋势年报-贝壳-20页.pdf
- (完整word版)基于单片机的智能交通灯控制系统设计.doc
- 四川天羚绒业公司电子商务营销策略研究.docx
- TI-DS125BR111.pdf
- Oracle培训基础1.ppt
- SAP-Warehouse-Insights-中文介绍
- sed&awk;手册
- MATLAB6.0数学手册精简版
- 年数据库技术大会万振龙数据治理与大数据平台设计40.pptx
- 计算机组装维修教程11
- 全国统一数据资产登记体系建设白皮书.pdf
- 北邮概率论与随机过程课件 教学内容: 1、事件的独立性; 2、伯努利试验概型。
- 电子商务与民航信息化(PPT).ppt
- SAP等公司的面试题
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论10