
相控阵天线方向图相控阵天线方向图——第第2部分:栅瓣和波束斜视部分:栅瓣和波束斜视
简介 关于相控阵天线方向图,我们将分三部分介绍,这是第二篇文章。 在 部分中,我们介绍了相控阵转
向概念,并查看了影响阵列增益的因素。在第二部分,我们将讨论栅瓣和波束斜视。栅瓣很难可视化,所以我
们利用它们与数字转换器中信号混叠的相似性,将栅瓣想象为空间混叠。接下来,我们探讨波束斜视的问题。
波束斜视是我们使用相移,而不是使用真实时间延迟来使波束转向时,天线在频段范围内无聚焦的现象。我们
还将讨论这两种转向方法之间的权衡取舍,并了解波束斜视对典型系统的影响。 栅瓣简介 到目前为
止,我们只见过元件间隔为 d = λ/2 这种情况。图 1 开始说明为什么λ/2 的元件间隔在相控阵中如此常见。图中
简介
关于相控阵天线方向图,我们将分三部分介绍,这是第二篇文章。 在 部分中,我们介绍了相控阵转向概念,并查看了
影响阵列增益的因素。在第二部分,我们将讨论栅瓣和波束斜视。栅瓣很难可视化,所以我们利用它们与数字转换器中信号混
叠的相似性,将栅瓣想象为空间混叠。接下来,我们探讨波束斜视的问题。波束斜视是我们使用相移,而不是使用真实时间延
迟来使波束转向时,天线在频段范围内无聚焦的现象。我们还将讨论这两种转向方法之间的权衡取舍,并了解波束斜视对典型
系统的影响。
栅瓣简介
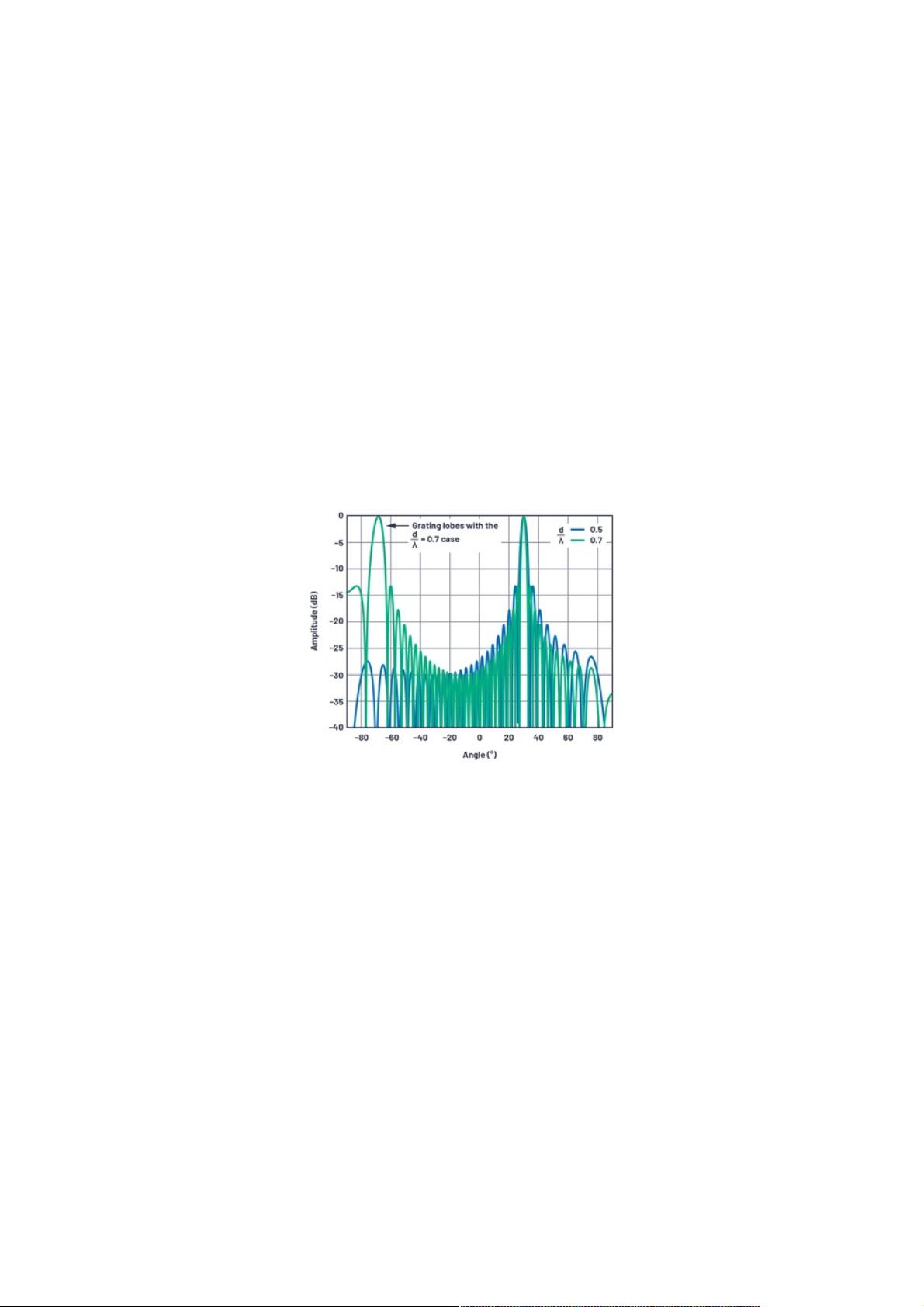
到目前为止,我们只见过元件间隔为 d = λ/2 这种情况。图 1 开始说明为什么λ/2 的元件间隔在相控阵中如此常见。图中
共显示两种情况。首先,是蓝色线条,重复显示第 1 部分图 11 中的 30°图。接下来,d/λ间隔增加到 0.7,以显示天线方向如
何变化。注意,随着间隔增加,波束宽度减小,这是一个积极现象。零值间隔减小使它们的距离更接近,这也可以接受。但是
现在出现了第二个角度,在本例中为–70°,在该角度下出现了全阵列增益。这是 为不利的情况。这种天线增益复制被定义为
一个栅瓣,可以被认为是空间混叠。
图 1. 在两种不同的 d/λ间隔下,32 元件线性阵列的标准化阵列因子。
采样系统的类比
为实现栅瓣可视化,可以将其类比为采样系统中的混叠现象。在模数转换器(ADC)中,接收器结构通常会对频率进行欠采
样。欠采样包括有意降低采样率(fS),通过采样过程将高于 fS/2 的频率(较高的奈奎斯特区)转换为 个奈奎斯特区的混叠。
这使得这些较高频率看起来似乎在 ADC 输出端为较低频率。
可以考虑在相控阵中采用类似的类比方法,在该阵列中,由元件对波前进行空间采样。如果我们建议为了避免混叠,对每
个波长实施两次采样(即元件),那么奈奎斯特准则可以扩展应用到空间区域。因此,如果元件间隔大于λ/2,我们可以考虑
这种空间混叠。
计算栅瓣出现的位置
但是这些空间混叠(栅瓣)会出现在哪里?在第 1 部分中,我们展示了整个阵列中元件的相移与波束角度之间的函数关
系。
反过来,我们可以根据与相移的函数关系来计算波束角度。
arcsin 函数只产生 -1 和+1 之间的实数解。在这些范围之外,无法得到实数解,电子数据表软件中会出现“#NUM!”。还要
注意,方程 2 中的相位呈周期性,每隔 2π重复 。所以,我们可以使用(m × 2π + ?Φ)取代波束转向公式中的?Φ,进而得出
公式 3。
其中 m = 0、±1、±2…
为了避免栅瓣,我们的目标是获得单一实数解。从数学上讲,这通过使下式成立来实现
如果我们这样做,那么所有的空间图像(即 m =±1、±2 等)将产生非实数 arcsin 结果,我们可以忽略它们。但如果我们
不能这样做,那么某些 m > 0 的值会产生实数 arcsin 结果,那么我们会得出多个解:栅瓣。

weixin_38610682
- 粉丝: 6
- 资源: 878
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- RTL8188FU-Linux-v5.7.4.2-36687.20200602.tar(20765).gz
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论1