
Texas Instruments Advanced Driver Assistance Systems (ADAS) Guide 2015 | 5
Camera-based systems
TDAx ADAS SoC
TDA2x system-on-chip (SoCs) family
Overview
TI’sTDA2xsystem-on-chips(SoCs)isahighlyoptimizedand
scalable device family designed to meet the requirements
of leading advanced driver assistance systems (ADAS). The
TDA2x family empowers broad ADAS applications in today’s
automobiles by integrating an optimal mix of performance,
low power and ADAS vision-analytics processing that aims
to facilitate a more autonomous and collision-free driving
experience.
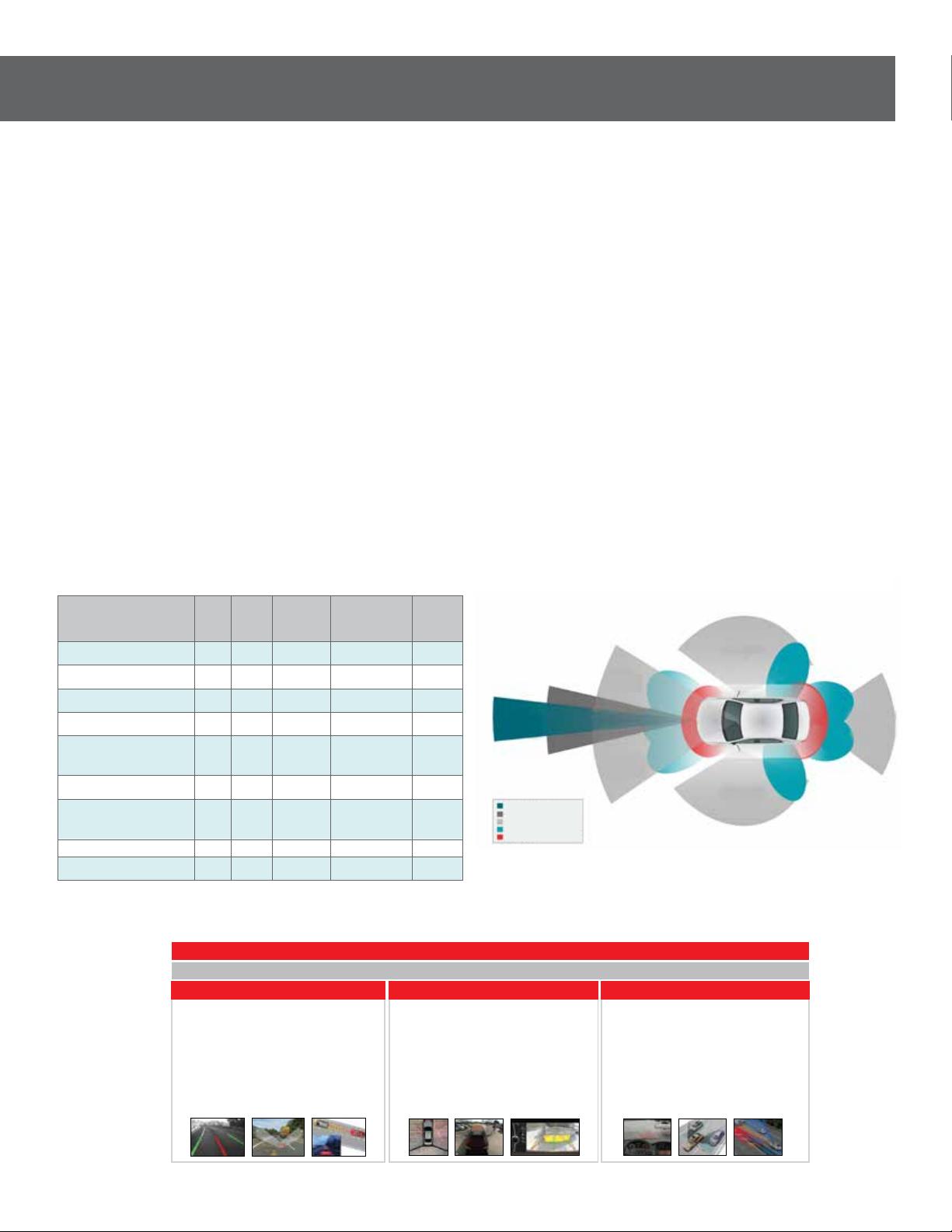
The TDA2x SoC makes possible sophisticated embedded
vision technology, providing the industry’s broadest range of
ADAS applications such as front camera, park assist, surround
view and sensor fusion on a single architecture. Front-camera
applications include high-beam assist, lane-keep assist,
adaptive cruise control, traffic-sign recognition, pedestrian/
objectdetectionandcollisionavoidance.Park-assist
applications include intelligent 2-D and 3-D surround view and
rear-collision warning and detection. The TDA2x SoC is also
capable of handling the fusion of radar and camera sensor
data, allowing for a more robust ADAS decision-
making process.
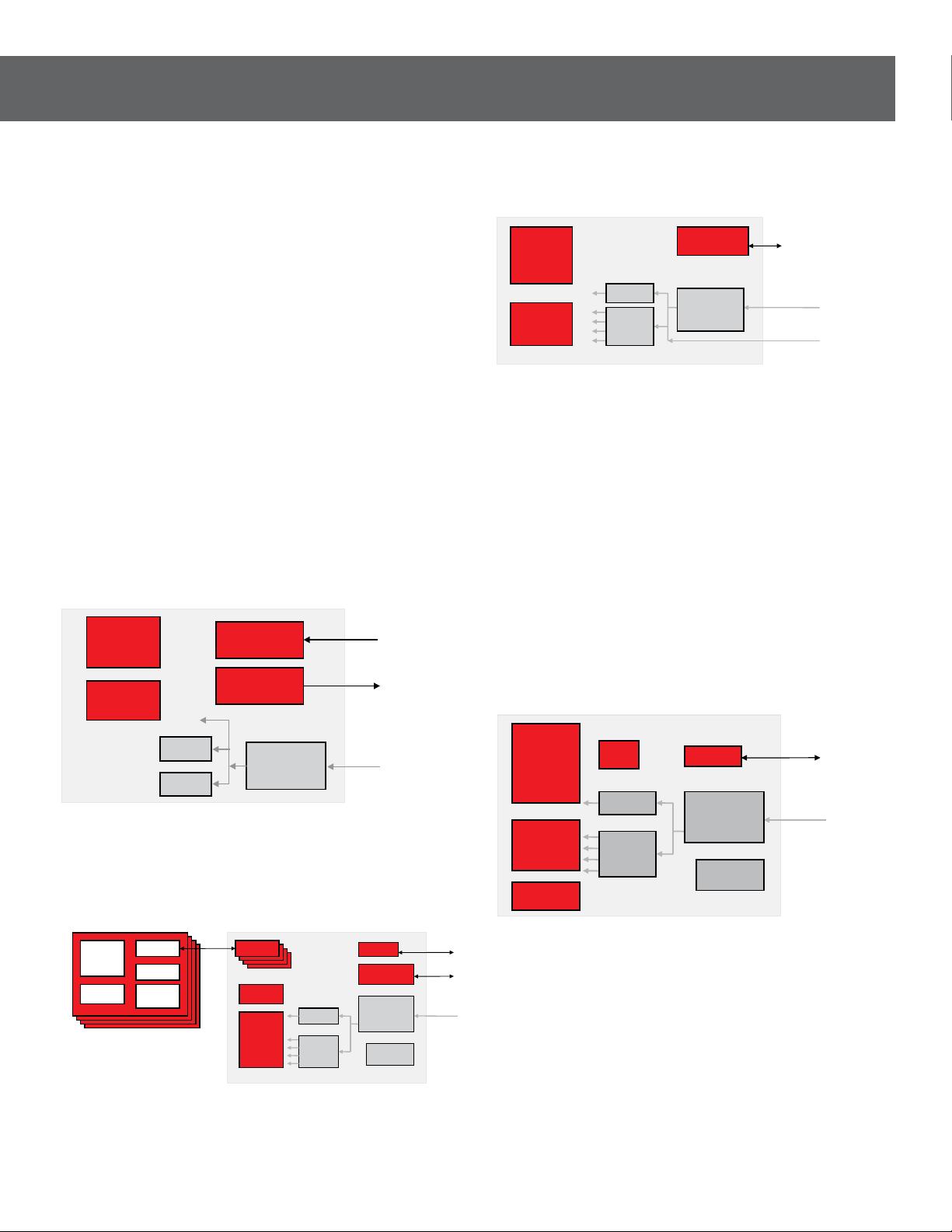
TDA2x architecture
The TDA2x SoC incorporates a heterogeneous, scal-
able architecture that includes a mix of TI’s fixed- and
floating-pointTMS320C66xdigitalsignalprocessor(DSP)
generationcores,VisionAccelerationPac,ARMCortex-A15
MPCoreanddualCortex-M4processors.Theintegration
of video for decoding multiple video streams over Ethernet
audio-video bridging (AVB) networks, along with graph-
ics accelerators for rendering virtual views, allows for a
3-D viewing experience. And the TDA2x SoC integrates a
host of peripherals, including multicamera interfaces (both
parallel and serial) for LVDS-based surround-view systems,
displays,CANandGigabitEthernetAVB.
Specifically, vision-oriented applications are partitioned into
low-, middle- and high-level processing. With the TDA2x,
TI has efficiently mapped out the ARM general-purpose
processing cores to manage core control processing.
Mid- to high-level processing is performed by one or more
DSPcoresoptimizedforreal-timefunctionssuchasobject
detection, and low- to mid-level processing is handled by
theVisionAccelerationPac.TheVisionAccelerationPac
was specifically designed to offload the processing of
visionalgorithmsfromtheTDA2xDSPandARMcores,
yielding the best performance for low- to mid-level vision
processing at the lowest-power footprint.
ARM
DSP
EVE
General-Purpose
System Control
Specialized
Vector Processing
High-Bandwidth
Processing
•VisionaccelerationPac(EVE)
- Vector processing
- Highest data bandwidth
•DSP
- Pipelined processing
- General purpose
•ARM
- System control
- High-level postprocessing
Heterogenous SoC concept for the highest processing
performance and power efficiency
德州仪器
(TI)
2015
年先进驾驶辅助系统
(ADAS)
指南
TDA2x
片上系统
(SoC)
系列
概述
TI
的
TDA2x
片上系统
(SoC)
是一款高度优化的可扩展器件系列
,
设计用于满足主要先进驾驶辅助系统
(ADAS)
的需要
。
通过将
性能
、
低功耗和目的在于促进更加自主和无碰撞的驾驶体 验的
ADAS
视觉分析处理最佳地融合在一起
,
TDA2x
系列实现了目前
汽车内的众多
ADAS
应用
。
TDA2x SoC
使精密嵌入式视觉技术成为可能
,
从而提供业内最
广泛的
ADAS
应用
,
诸如前视摄像头
、
泊车辅助
、
环视和单一架
构上的传感器融合
。
前视摄像头应用包括远光灯辅助
、
车道保持
辅助
、
自适应巡航控制
、
交通信号识别
、
行人
/
物体检测和碰撞避
免
。
泊车辅助应用包括智能
2D
和
3D
环视
,
以及后部碰撞告警和
检测
。
TDA2x SoC
还能够处理雷达和摄像头传感器数据的融合
,
从而实现更加健全的
ADAS
决策过程
。
TDA2x
架构
TDA2x SoC
包含一个异构
、
可扩展的架构
。
此架构包括一个
TI
定
点和浮点
TMS320C66x
数字信号处理器
(DSP)
生成内核
、
视觉
AccelerationPac
、
ARM Cortex-A15 MPCore
和双
Cortex-M4
处
理器的组合
。
面向以太网音频
-
视频桥接
(AVB)
网络上多视频流
解码的视频集成
,
连同渲染视野的图形加速器
,
可实现
3D
观察体
验
。
TDA2x SoC
还 集 成了一 个 外 设 主 机
,
其中包括面向基于低压
差分信令
(LVDS)
的环视系统
、
显示
、
CAN
和千兆以太网
AVB
的
多摄像头接口
(
包括并行和串行接口
)。
特别是
,
面向视觉的应用被分开进行低级
、
中级
、
高级处理
。
借助
TDA2x
,
TI
已经设计出高效的
ARM
专用处理内核
,
旨在管理内核
控制处理
。
中级到高级处理由一个或数个针对物体检测等实时功能进行优
化的
DSP
内核执行
,
而低级到中级处理由
Vision AccelerationPac
完成
。
Vision AccelerationPac
曾专门设计用于减轻
TDA2x DSP
和
ARM
内核的视觉算法处理压力
,
从而用最低能耗占用产生最
佳低级到中级处理性能
。
基于摄像头的系统
TDAx ADAS SoC
面向最高处理性能和能效的异构
SoC
概念
• Vision AccelerationPac (EVE)
―
矢量处理
―
-
最高数据带宽
• DSP
―
流水线处理
―
多用途
• ARM
―
系统控制
―
-
高级后续处理
通用
系统控制
专用用途
矢量处理
高带宽处理


 我的内容管理
收起
我的内容管理
收起
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助 







评论5