

POWER DRIVER FOR STEPPER MOTORS INTEGRATED CIRCUITS
TRINAMIC Motion Control GmbH & Co. KG
Hamburg, Germany
TMC2208/2 & TMC2224/0/5 family Datasheet
FEATURES AND BENEFITS
2-phase stepper motors up to 2A coil current (peak)
STEP/DIR Interface with 2, 4, 8, 16 or 32 microstep pin
setting
Smooth Running 256 microsteps by microPlyer™ interpolation
stealthChop2™ silent motor operation
spreadCycle™ highly dynamic motor control chopper
Low RDSon LS 280mΩ & HS 290mΩ (typ. at 25°C)
Voltage Range 4.75… 36V DC
Automatic Standby current reduction (option)
Internal Sense Resistor option (no sense resistors required)
Passive Braking and Freewheeling
Single Wire UART & OTP for advanced configuration options
Integrated Pulse Generator for standalone motion
Full Protection & Diagnostics
Choice of QFN, TQFP and HTSSOP packages for best fit
APPLICATIONS
Compatible Design Upgrade
3D Printers
Printers, POS
Office and home automation
Textile, Sewing Machines
CCTV, Security
ATM, Cash recycler
HVAC
DESCRIPTION
The TMC2202, TMC2208, TMC2220, TMC2224
and TMC2225 are ultra-silent motor driver
ICs for two phase stepper motors. Their
pinning is compatible to a number of
legacy drivers. TRINAMICs sophisticated
stealthChop2 chopper ensures noiseless
operation, maximum efficiency and best
motor torque. Its fast current regulation
and optional combination with spreadCycle
allow for highly dynamic motion.
Integrated power-MOSFETs handle motor
current up to 1.4A RMS. Protection and
diagnostic features support robust and
reliable operation. A simple to use UART
interface opens up more tuning and
control options. Application specific tuning
can be stored to OTP memory. Industries’
most advanced STEP/DIR stepper motor
driver family upgrades designs to noiseless
and most precise operation for cost-
effective and highly competitive solutions.
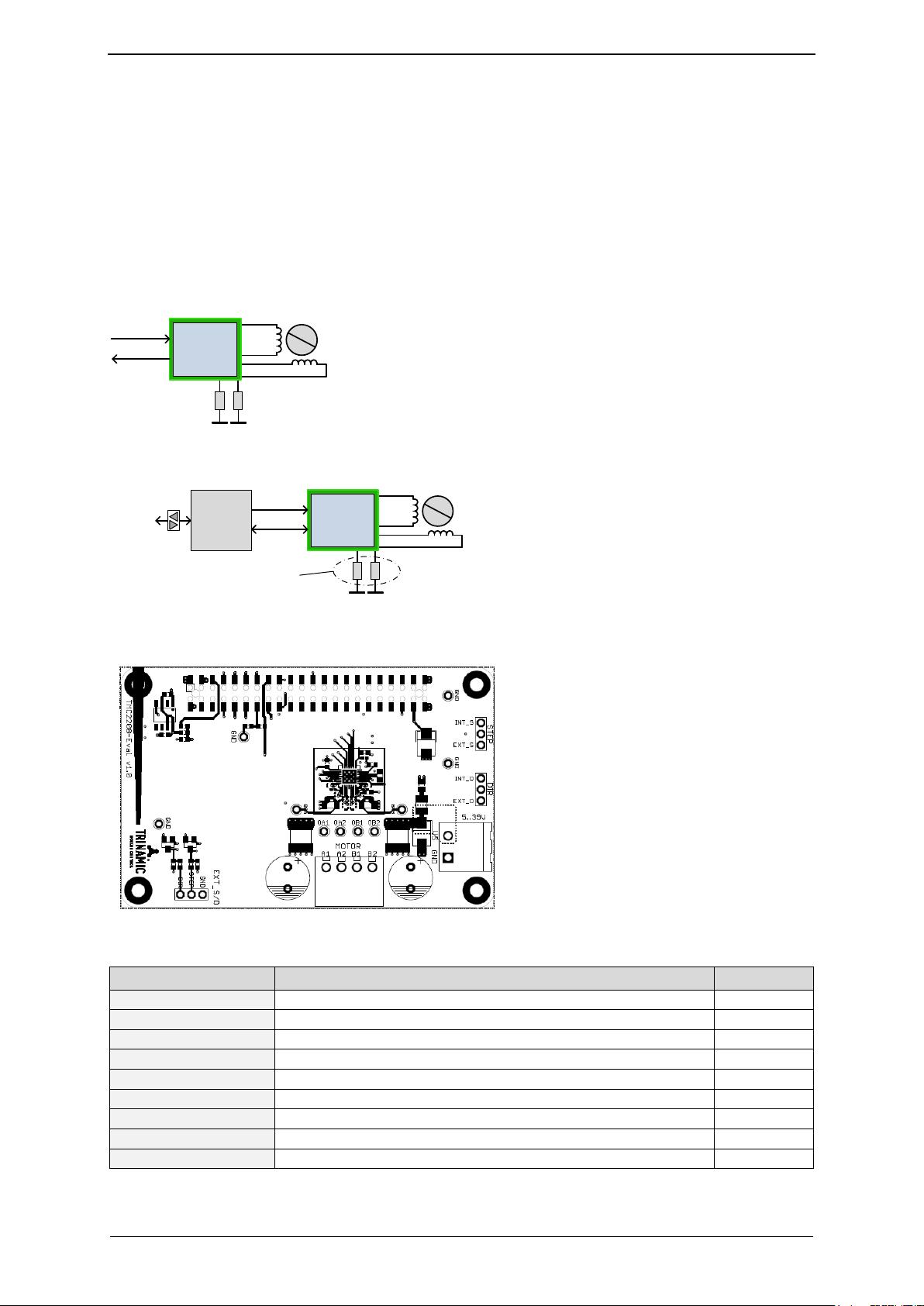
TMC2202, TMC2208, TMC2220, TMC2224, TMC2225 Step/Dir Drivers for Two-Phase Bipolar Stepper Motors
up to 2A peak - stealthChop™ for Quiet Movement - UART Interface Option.
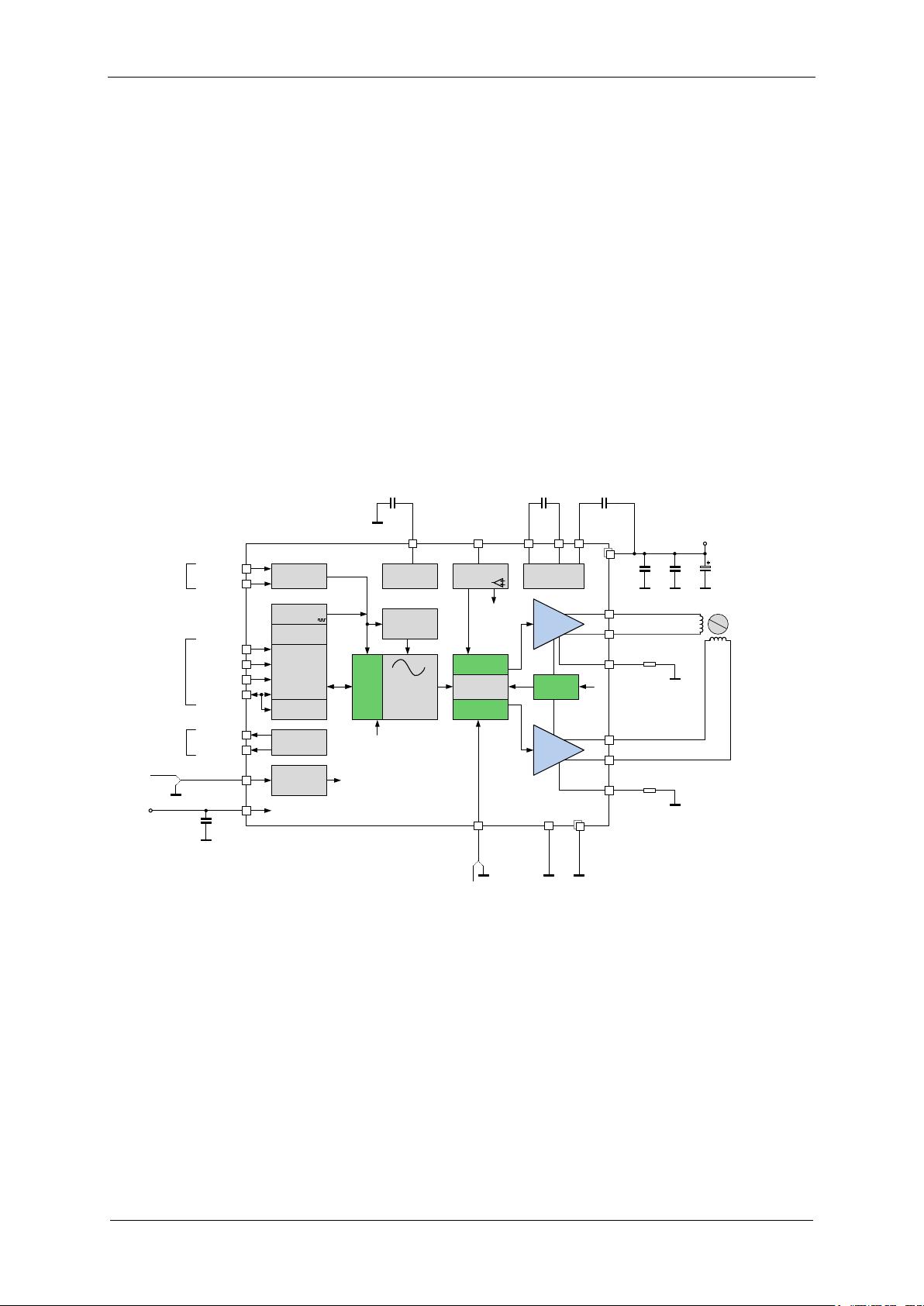
BLOCK DIAGRAM
spreadCycle
stealthChop2
DRIVER
TMC220X
TMC222X
256 µStep
Sequencer
Pulse Generator
UART
optional control
Power
Supply
Motor
Step/Dir
Step Multiplyer
spreadCycle
stealthChop
DAC Reference
IREF optional current scaling
UART Control
CLK
Control
Register
Set
Standstill Current
Reduction
CLK Oscillator /
Selector
Charge Pump
+5V Regulator
Mode
Selection
Configuration
Pins
OTP
memory
Protection
& Diagnostics
Diag Out /
Index

剩余80页未读,继续阅读

pass1876
- 粉丝: 0
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 2023年中国辣条食品行业创新及消费需求洞察报告.pptx
- 2023年半导体行业20强品牌.pptx
- 2023年全球电力行业评论.pptx
- 2023年全球网络安全现状-劳动力资源和网络运营的全球发展新态势.pptx
- 毕业设计-基于单片机的液体密度检测系统设计.doc
- 家用清扫机器人设计.doc
- 基于VB+数据库SQL的教师信息管理系统设计与实现 计算机专业设计范文模板参考资料.pdf
- 官塘驿林场林防火(资源监管)“空天地人”四位一体监测系统方案.doc
- 基于专利语义表征的技术预见方法及其应用.docx
- 浅谈电子商务的现状及发展趋势学习总结.doc
- 基于单片机的智能仓库温湿度控制系统 (2).pdf
- 基于SSM框架知识产权管理系统 (2).pdf
- 9年终工作总结新年计划PPT模板.pptx
- Hytera海能达CH04L01 说明书.pdf
- 数据中心运维操作标准及流程.pdf
- 报告模板 -成本分析与报告培训之三.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论5