
Python实现实现Canny及及Hough算法代码实例解析算法代码实例解析
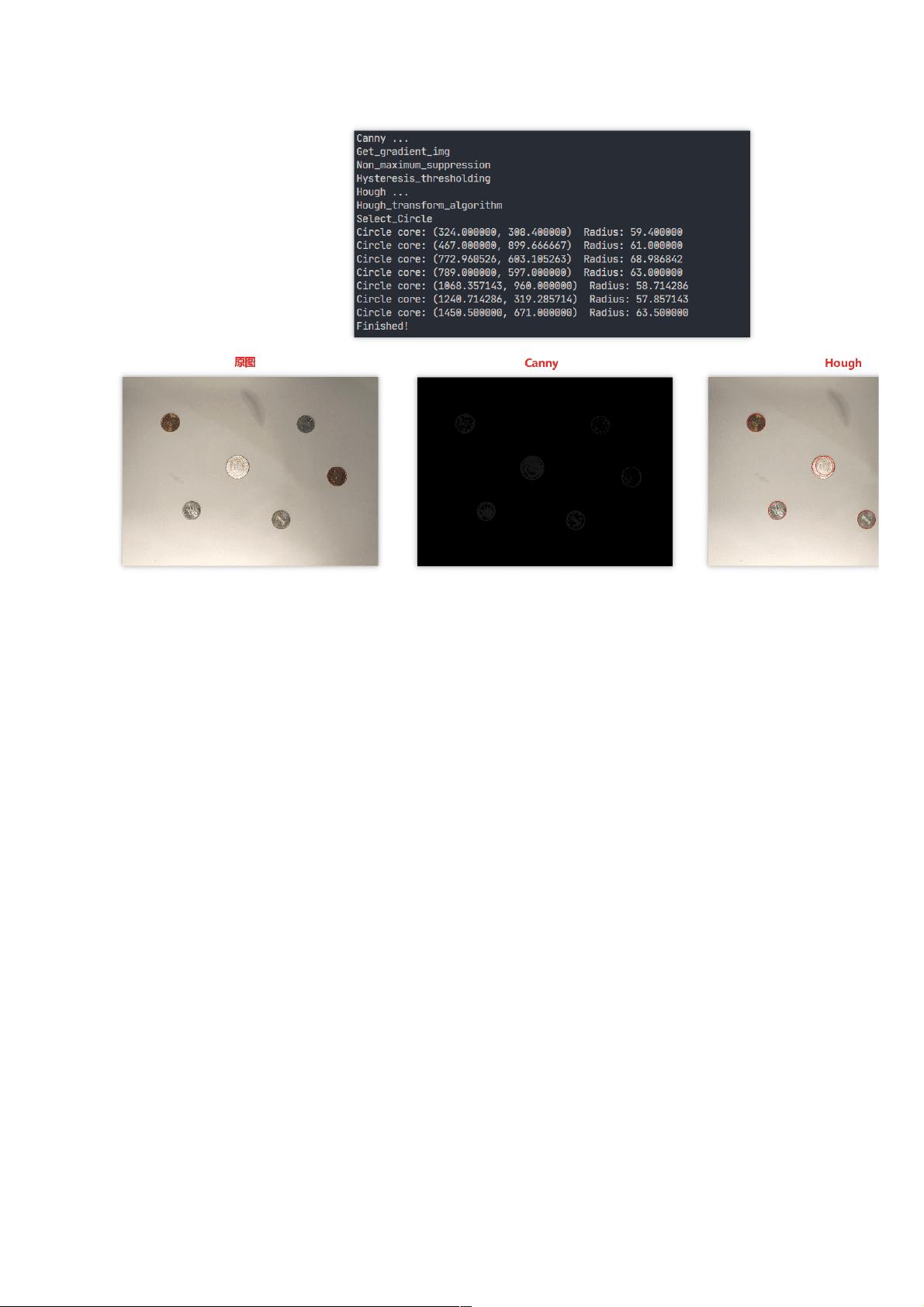
任务说明:编写一个钱币定位系统,其不仅能够检测出输入图像中各个钱币的边缘,同时,还能给出各个钱币的圆心坐标与半径。
效果
代码实现
Canny边缘检测:
# Author: Ji Qiu (BUPT)
# filename: my_canny.py
import cv2
import numpy as np
class Canny:
def __init__(self, Guassian_kernal_size, img, HT_high_threshold, HT_low_threshold):
'''
:param Guassian_kernal_size: 高斯滤波器尺寸
:param img: 输入的图片,在算法过程中改变
:param HT_high_threshold: 滞后阈值法中的高阈值
:param HT_low_threshold: 滞后阈值法中的低阈值
'''
self.Guassian_kernal_size = Guassian_kernal_size
self.img = img
self.y, self.x = img.shape[0:2] self.angle = np.zeros([self.y, self.x])
self.img_origin = None
self.x_kernal = np.array([[-1, 1]])
self.y_kernal = np.array([[-1], [1]])
self.HT_high_threshold = HT_high_threshold
self.HT_low_threshold = HT_low_threshold
def Get_gradient_img(self):
'''
计算梯度图和梯度方向矩阵。
:return: 生成的梯度图
'''
print ('Get_gradient_img')
new_img_x = np.zeros([self.y, self.x], dtype=np.float)
new_img_y = np.zeros([self.y, self.x], dtype=np.float)
for i in range(0, self.x):
for j in range(0, self.y):
if j == 0:
new_img_y[j][i] = 1
else:
new_img_y[j][i] = np.sum(np.array([[self.img[j - 1][i]], [self.img[j][i]]]) * self.y_kernal)
if i == 0:
new_img_x[j][i] = 1
else:
new_img_x[j][i] = np.sum(np.array([self.img[j][i - 1], self.img[j][i]]) * self.x_kernal)
gradient_img, self.angle = cv2.cartToPolar(new_img_x, new_img_y)#返回幅值和相位
self.angle = np.tan(self.angle)
self.img = gradient_img.astype(np.uint8)
return self.img
def Non_maximum_suppression (self):
'''
对生成的梯度图进行非极大化抑制,将tan值的大小与正负结合,确定离散中梯度的方向。
:return: 生成的非极大化抑制结果图
'''
print ('Non_maximum_suppression')
result = np.zeros([self.y, self.x])

weixin_38670433
- 粉丝: 9
- 资源: 899
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 2023年中国辣条食品行业创新及消费需求洞察报告.pptx
- 2023年半导体行业20强品牌.pptx
- 2023年全球电力行业评论.pptx
- 2023年全球网络安全现状-劳动力资源和网络运营的全球发展新态势.pptx
- 毕业设计-基于单片机的液体密度检测系统设计.doc
- 家用清扫机器人设计.doc
- 基于VB+数据库SQL的教师信息管理系统设计与实现 计算机专业设计范文模板参考资料.pdf
- 官塘驿林场林防火(资源监管)“空天地人”四位一体监测系统方案.doc
- 基于专利语义表征的技术预见方法及其应用.docx
- 浅谈电子商务的现状及发展趋势学习总结.doc
- 基于单片机的智能仓库温湿度控制系统 (2).pdf
- 基于SSM框架知识产权管理系统 (2).pdf
- 9年终工作总结新年计划PPT模板.pptx
- Hytera海能达CH04L01 说明书.pdf
- 数据中心运维操作标准及流程.pdf
- 报告模板 -成本分析与报告培训之三.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0