

MobileNetV2: Inverted Residuals and Linear Bottlenecks
Mark Sandler Andrew Howard Menglong Zhu Andrey Zhmoginov Liang-Chieh Chen
Google Inc.
{sandler, howarda, menglong, azhmogin, lcchen}@google.com
Abstract
In this paper we describe a new mobile architecture,
MobileNetV2, that improves the state of the art perfor-
mance of mobile models on multiple tasks and bench-
marks as well as across a spectrum of different model
sizes. We also describe efficient ways of applying these
mobile models to object detection in a novel framework
we call SSDLite. Additionally, we demonstrate how
to build mobile semantic segmentation models through
a reduced form of DeepLabv3 which we call Mobile
DeepLabv3.
is based on an inverted residual structure where
the shortcut connections are between the thin bottle-
neck layers. The intermediate expansion layer uses
lightweight depthwise convolutions to filter features as
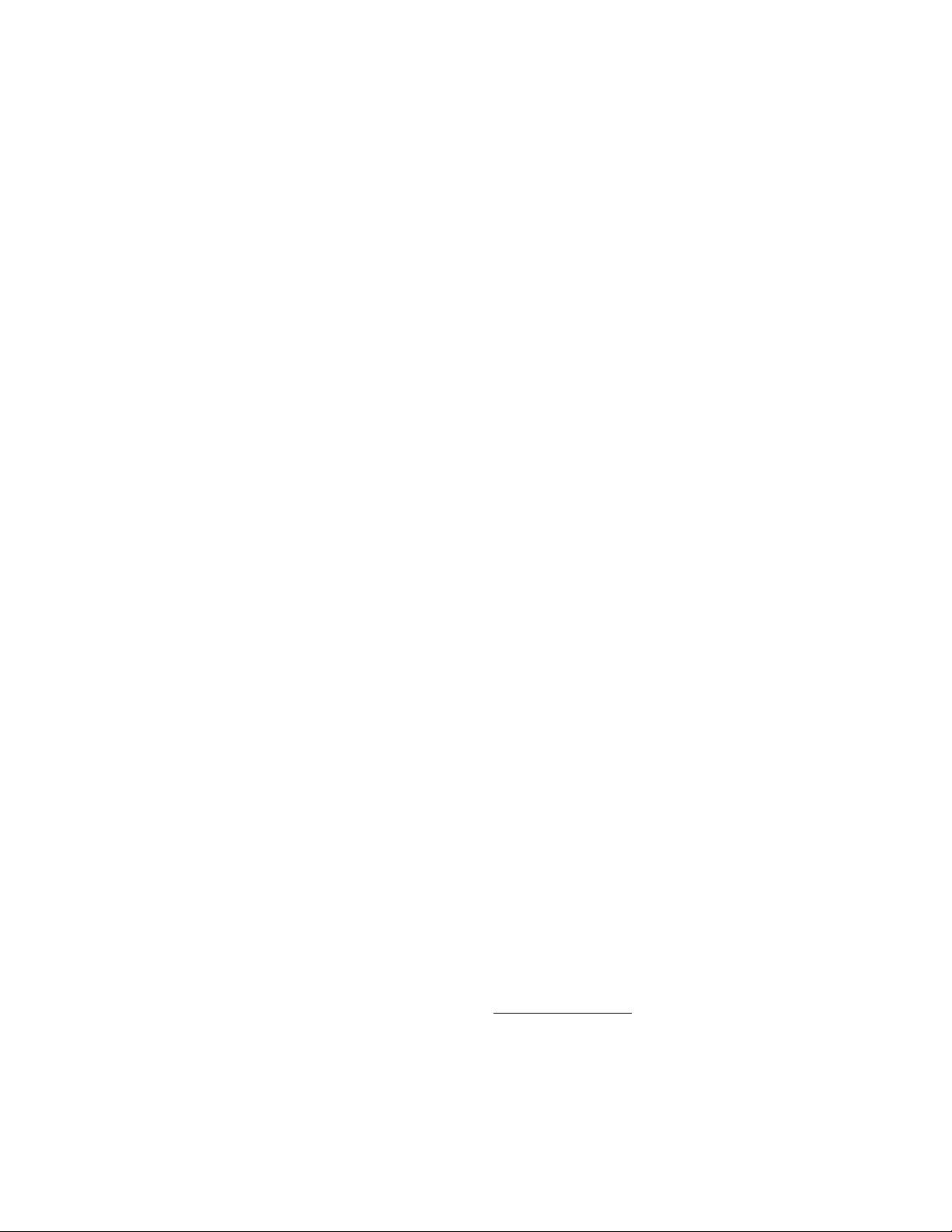
a source of non-linearity. Additionally, we find that it is
important to remove non-linearities in the narrow layers
in order to maintain representational power. We demon-
strate that this improves performance and provide an in-
tuition that led to this design.
Finally, our approach allows decoupling of the in-
put/output domains from the expressiveness of the trans-
formation, which provides a convenient framework for
further analysis. We measure our performance on
ImageNet [1] classification, COCO object detection [2],
VOC image segmentation [3]. We evaluate the trade-offs
between accuracy, and number of operations measured
by multiply-adds (MAdd), as well as actual latency, and
the number of parameters.
1. Introduction
Neural networks have revolutionized many areas of
machine intelligence, enabling superhuman accuracy for
challenging image recognition tasks. However, the drive
to improve accuracy often comes at a cost: modern state
of the art networks require high computational resources
beyond the capabilities of many mobile and embedded
applications.
This paper introduces a new neural network architec-
ture that is specifically tailored for mobile and resource
constrained environments. Our network pushes the state
of the art for mobile tailored computer vision models,
by significantly decreasing the number of operations and
memory needed while retaining the same accuracy.
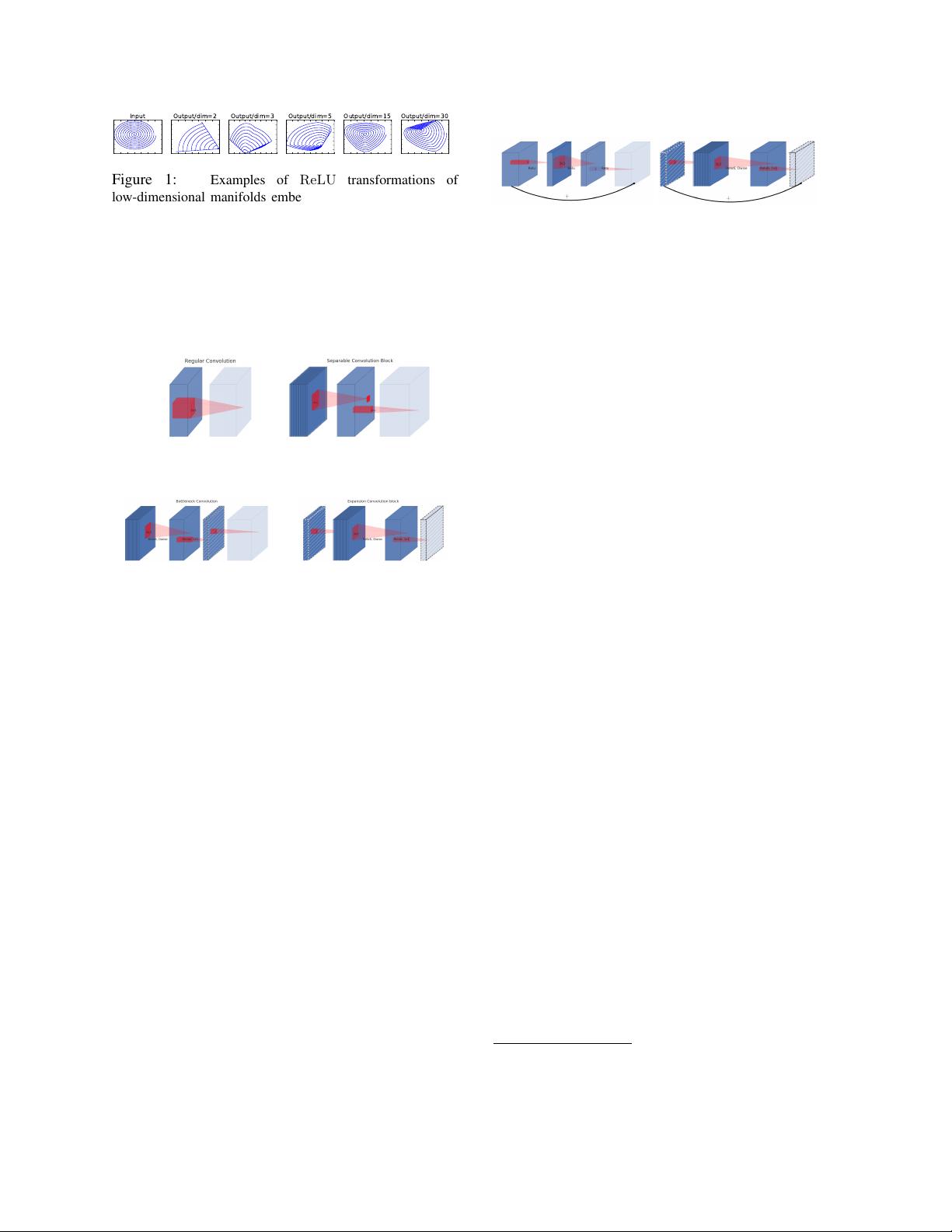
Our main contribution is a novel layer module: the
inverted residual with linear bottleneck. This mod-
ule takes as an input a low-dimensional compressed
representation which is first expanded to high dimen-
sion and filtered with a lightweight depthwise convo-
lution. Features are subsequently projected back to a
low-dimensional representation with a linear convolu-
tion. The official implementation is available as part of
TensorFlow-Slim model library in [4].
This module can be efficiently implemented using
standard operations in any modern framework and al-
lows our models to beat state of the art along multiple
performance points using standard benchmarks. Fur-
thermore, this convolutional module is particularly suit-
able for mobile designs, because it allows to signifi-
cantly reduce the memory footprint needed during in-
ference by never fully materializing large intermediate
tensors. This reduces the need for main memory access
in many embedded hardware designs, that provide small
amounts of very fast software controlled cache memory.
2. Related Work
Tuning deep neural architectures to strike an optimal
balance between accuracy and performance has been
an area of active research for the last several years.
Both manual architecture search and improvements in
training algorithms, carried out by numerous teams has
lead to dramatic improvements over early designs such
as AlexNet [5], VGGNet [6], GoogLeNet [7]. , and
ResNet [8]. Recently there has been lots of progress
in algorithmic architecture exploration included hyper-
parameter optimization [9, 10, 11] as well as various
arXiv:1801.04381v3 [cs.CV] 2 Apr 2018
剩余13页未读,继续阅读

匠人_C
- 粉丝: 26
- 资源: 10
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- stc12c5a60s2 例程
- Android通过全局变量传递数据
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0