

目录
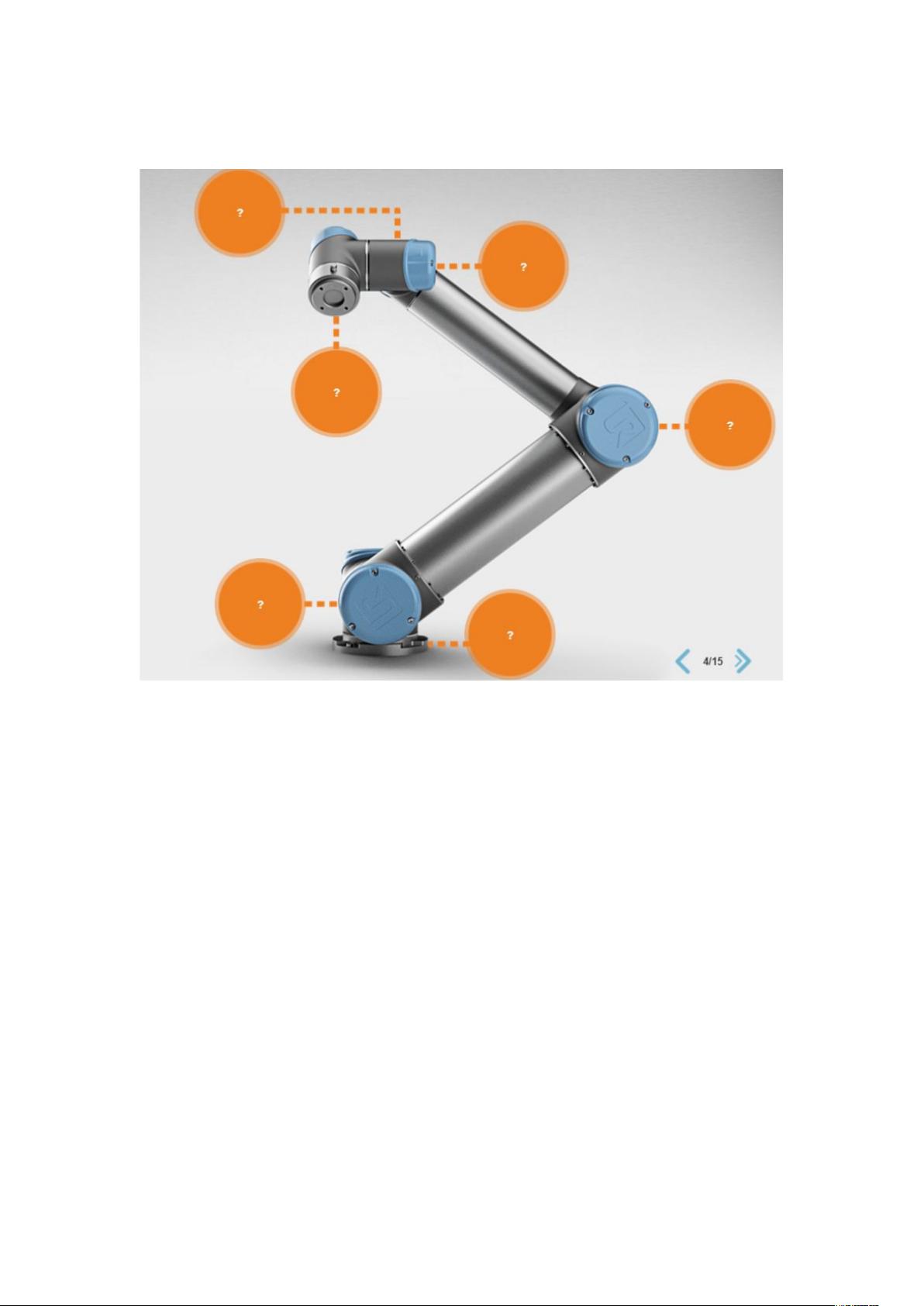
特色与术语............................................................................................................................ 2
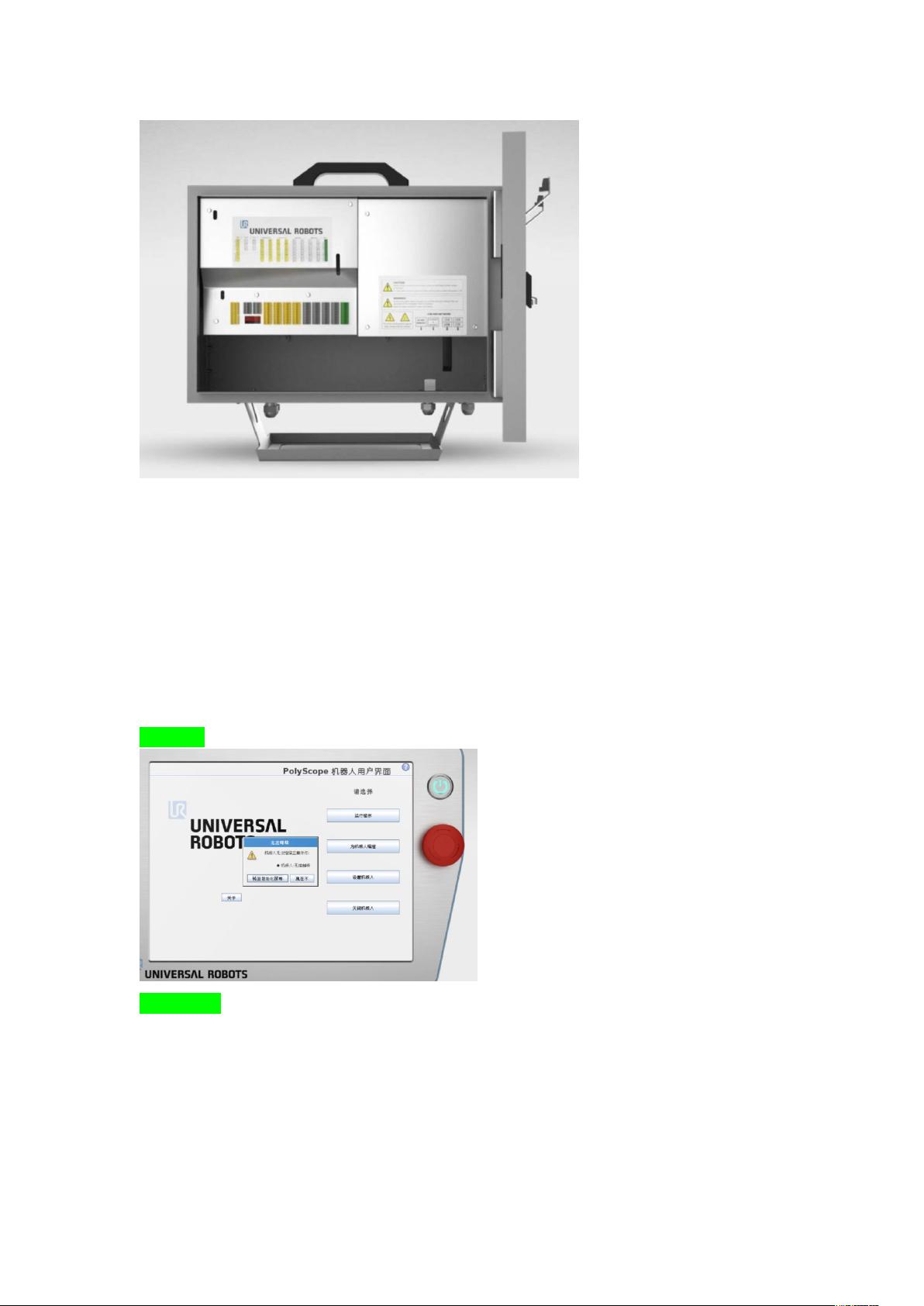
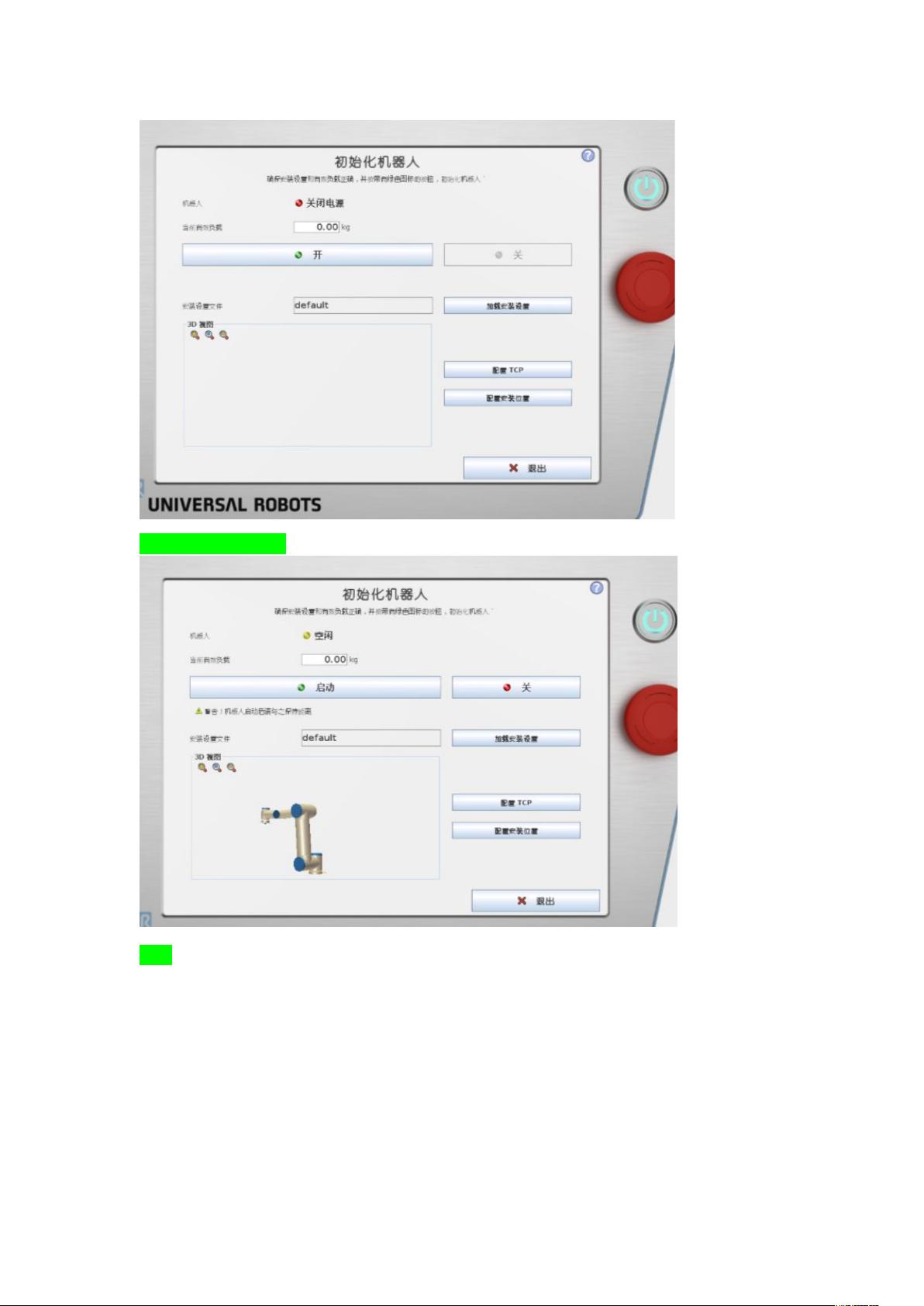
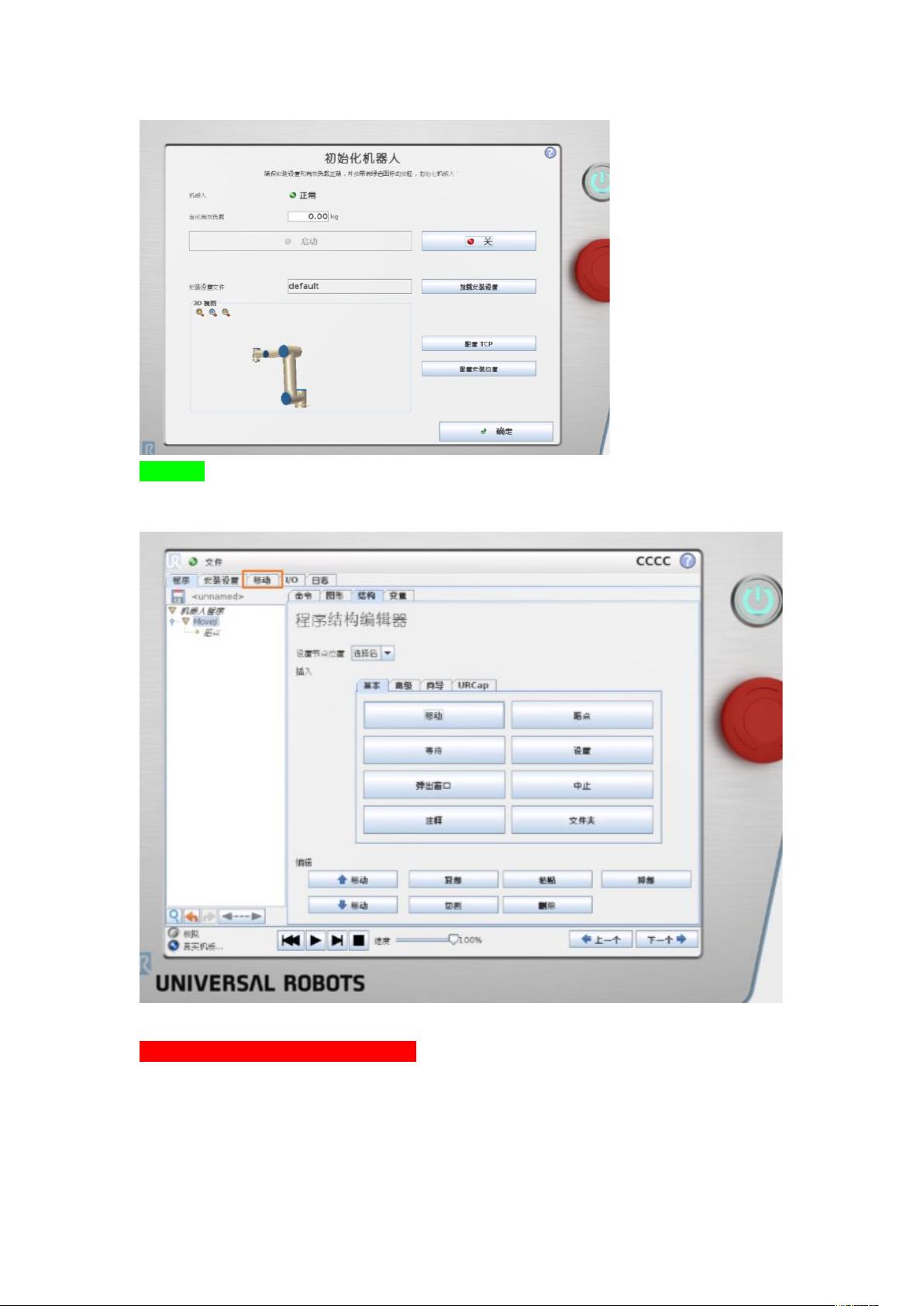
模块 2 设置机器人执行特定任务................................................................................................. 7
3.1 工具中心点配置:................................................................................................................. 11
3.2 有效载荷配置:.................................................................................................................... 12
1.测量工具的重量............................................................................................................... 12
2.输入到有效负载,单击保存图标,之后保存按钮.........................................................12
3.3 设置重心:............................................................................................................................ 13
1.测量距离........................................................................................................................... 13
2. 单击重心图标,输入 cz 并保存...................................................................................... 14
3.4 示教机器人工具中心点:..................................................................................................... 15
1.单击位置按钮:............................................................................................................... 15
2.单击设置点 1 开始:........................................................................................................ 16
3.将工具中心点拖到某个点,单击示教器确认保存改点.................................................16
4.单击设置点 2,将工具中心点拖到另一个点,单击保存..............................................16
5.直到四个都确认好,........................................................................................................ 16
6.单击设置按钮,软件根据四个点计算出工具中心点.....................................................16
7.然后点击加载/保存.......................................................................................................... 16
3.5 示教机器人工具的方向......................................................................................................... 16
1.单击方向按钮,单击下拉菜单,选择基座,单击设置点.............................................16
2.单击设置点....................................................................................................................... 16
3. 单击确认,使用该位置................................................................................................... 17
4. 单击设置按钮.................................................................................................................. 17
5. 单击保存图标,单击保存............................................................................................... 17
在 ployscope 中创建程序:................................................................................................. 20
在 movep 可以添加圆形移动.............................................................................................. 24
插入等待命令...................................................................................................................... 27
全................................................................................................................................................. 30
定义边界,机器人不允许进入区域...................................................................................30
机器人在正常工作时,当人进入区域,进入限制模式....................................................30
1. 设置安全扫描仪............................................................................................................... 30
2. 设置机器人工作边界....................................................................................................... 35
当进入机器人工作边界,就会保护性停止........................................................................35
剩余63页未读,继续阅读

求知小菜鸟
- 粉丝: 1805
- 资源: 28
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- RTL8188FU-Linux-v5.7.4.2-36687.20200602.tar(20765).gz
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论5