

CHAPTER 21
EXPERIMENTAL MODAL
ANALYSIS
Randall J. Allemang
David L. Brown
INTRODUCTION
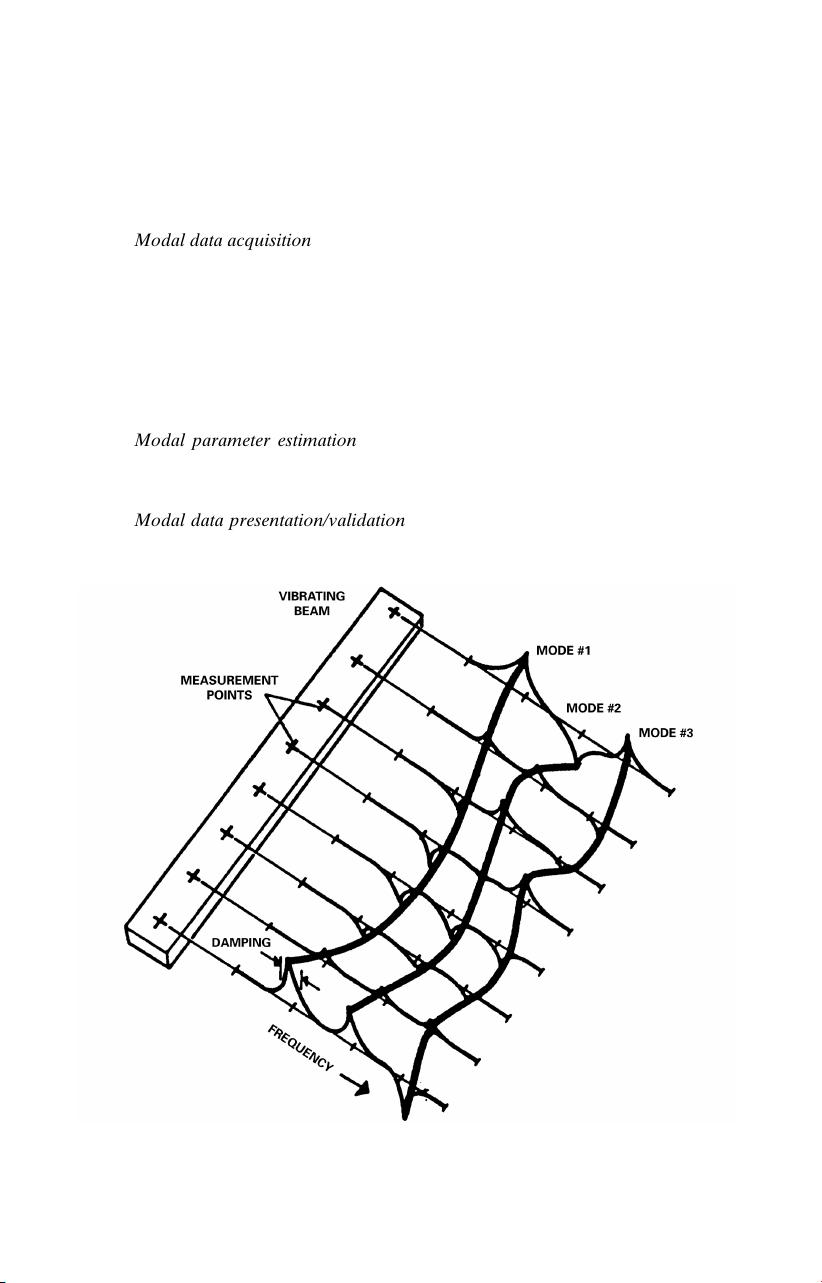
Experimental modal analysis is the process of determining the modal parameters
(natural frequencies, damping factors, modal vectors, and modal scaling) of a linear,
time-invariant system. The modal parameters are often determined by analytical
means, such as finite element analysis. One common reason for experimental modal
analysis is the verification/correction of the results of the analytical approach. Often,
an analytical model does not exist and the modal parameters determined experi-
mentally serve as the model for future evaluations such as structural modifications.
Predominately, experimental modal analysis is used to explain a dynamics problem
(vibration or acoustic) whose solution is not obvious from intuition, analytical mod-
els, or previous experience.
The process of determining modal parameters from experimental data involves
several phases. The success of the experimental modal analysis process depends
upon having very specific goals for the test situation. Every phase of the process is
affected by the goals which are established, particularly with respect to the errors
associated with that phase. One possible delineation of these phases is as follows:
Modal analysis theory refers to that portion of classical vibrations that
explains, theoretically, the existence of natural frequencies, damping factors,
mode shapes, and modal scaling for linear systems. This theory includes both
lumped-parameter, or discrete, models as well as continuous models that rep-
resent the distribution of mass, damping, and stiffness. Since most current
modal parameter estimation methods are based upon frequency response
functions (FRFs) or impulse response functions (IRFs), modal analysis theory
also includes the theoretical definition of these functions with respect to mass,
damping, and stiffness as well. Modal analysis theory also includes the con-
cepts of real normal modes as well as complex modes of vibration as possible
solutions for the modal parameters.
1–3
Experimental modal analysis methods involve the theoretical relationship
between measured quantities and the classic vibration theory often repre-
21.1
Downloaded from Digital Engineering Library @ McGraw-Hill (www.accessengineeringlibrary.com)
Copyright © 2009 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Source: HARRIS’ SHOCK AND VIBRATION HANDBOOK



剩余53页未读,继续阅读

木兵
- 粉丝: 0
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 2023年中国辣条食品行业创新及消费需求洞察报告.pptx
- 2023年半导体行业20强品牌.pptx
- 2023年全球电力行业评论.pptx
- 2023年全球网络安全现状-劳动力资源和网络运营的全球发展新态势.pptx
- 毕业设计-基于单片机的液体密度检测系统设计.doc
- 家用清扫机器人设计.doc
- 基于VB+数据库SQL的教师信息管理系统设计与实现 计算机专业设计范文模板参考资料.pdf
- 官塘驿林场林防火(资源监管)“空天地人”四位一体监测系统方案.doc
- 基于专利语义表征的技术预见方法及其应用.docx
- 浅谈电子商务的现状及发展趋势学习总结.doc
- 基于单片机的智能仓库温湿度控制系统 (2).pdf
- 基于SSM框架知识产权管理系统 (2).pdf
- 9年终工作总结新年计划PPT模板.pptx
- Hytera海能达CH04L01 说明书.pdf
- 数据中心运维操作标准及流程.pdf
- 报告模板 -成本分析与报告培训之三.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0