Chapter 11. Reconstructing 3D
Scenes
In this chapter, we will cover the following recipes:
Calibrating a camera
Recovering camera pose
Reconstructing a 3D scene from calibrated cameras
Computing depth from stereo image
Introduction
We learned in the previous chapter how a camera captures a 3D scene
by projecting light rays on a 2D sensor plane. The image produced is an
accurate representation of what the scene looks like from a particular
point of view, at the instant the image was captured. However, by its
nature, the process of image formation eliminates all information
concerning the depth of the represented scene elements. This chapter
will teach how, under specific conditions, the 3D structure of the scene
and the 3D pose of the cameras that captured it, can be recovered. We
will see how a good understanding of projective geometry concepts
allows us to devise methods that enable 3D reconstruction. We will
therefore revisit the principle of image formation introduced in the
previous chapter; in particular, we will now take into consideration that
our image is composed of pixels.
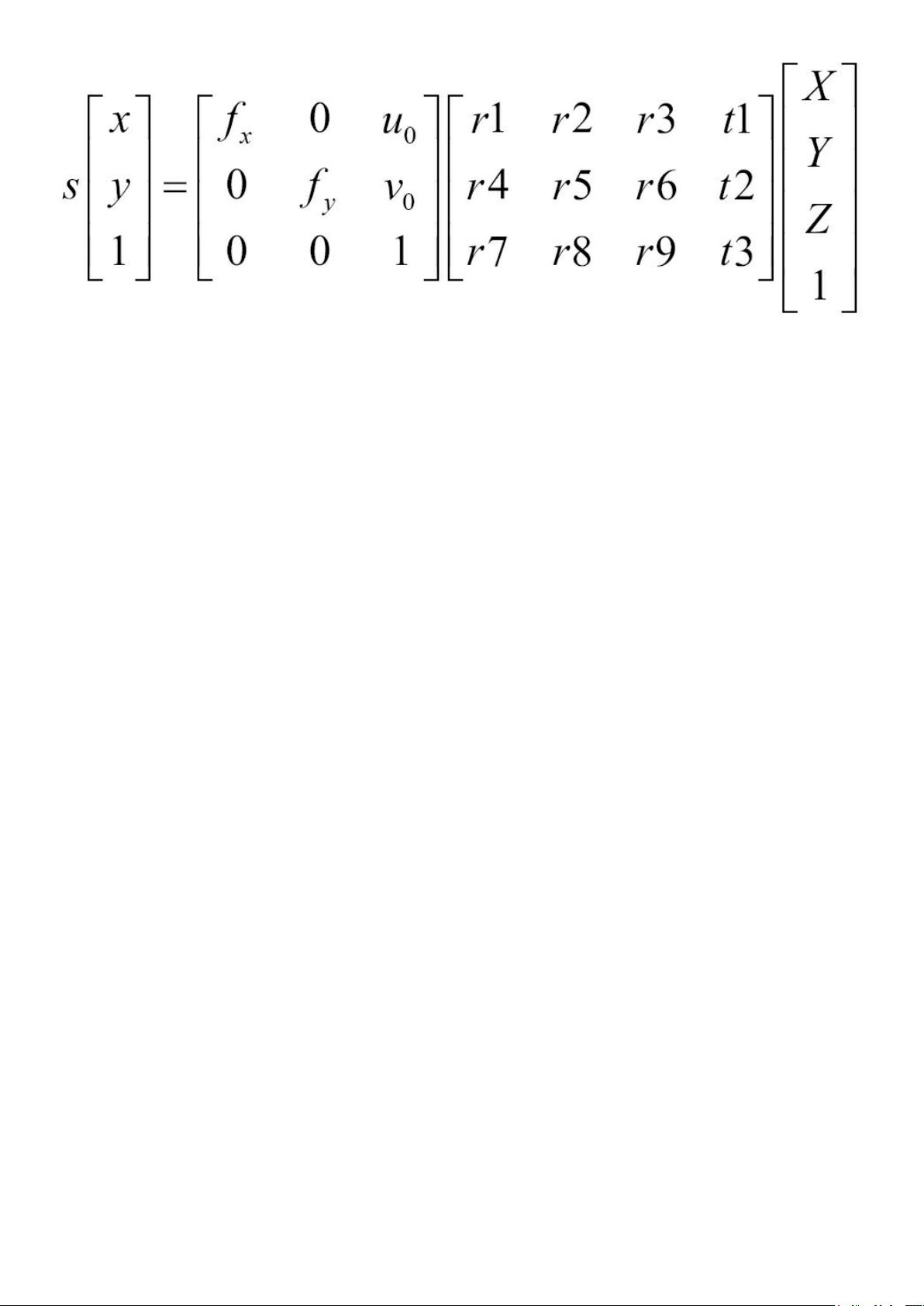
Digital image formation
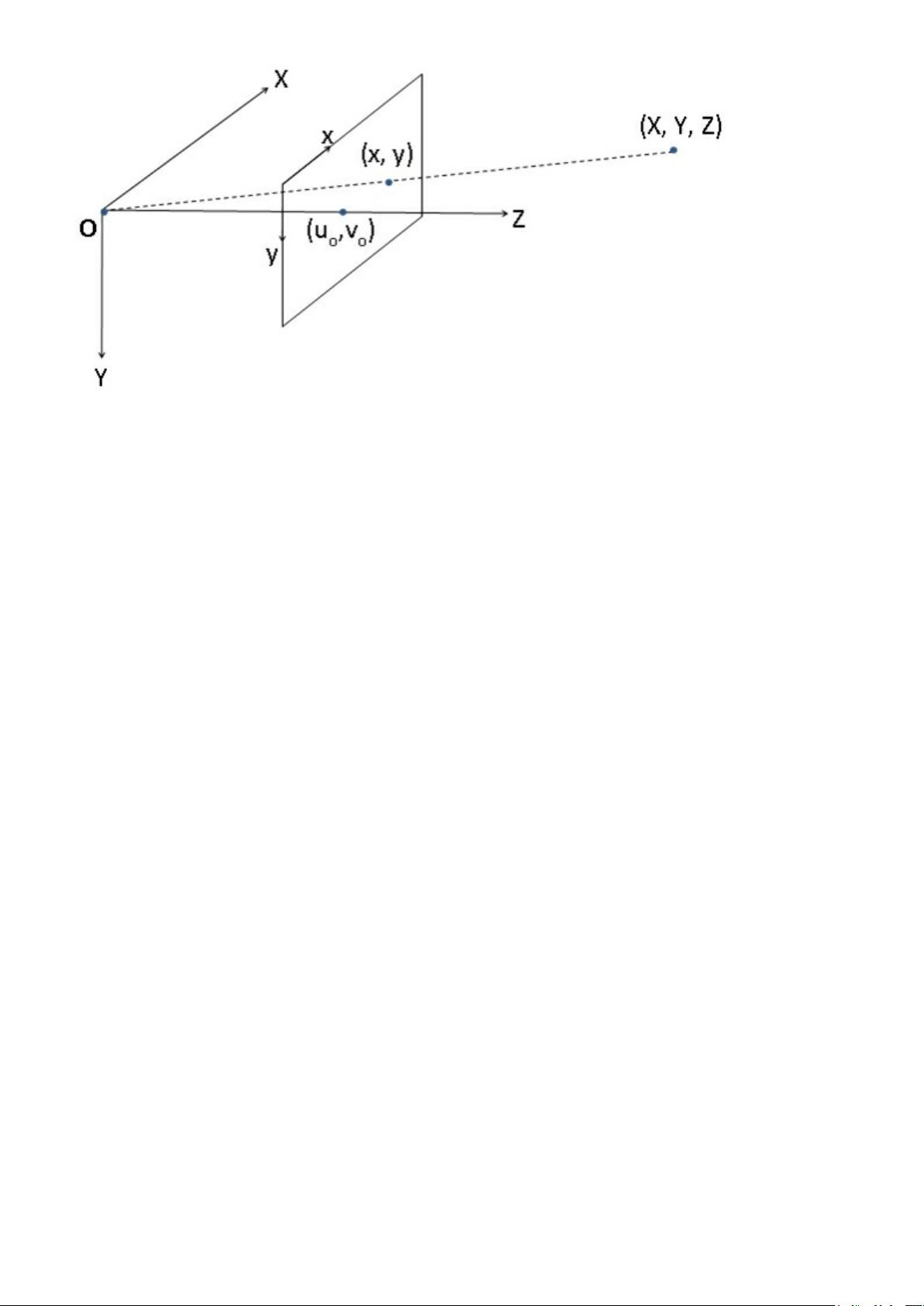
Let's now redraw a new version of the figure shown in Chapter 10 ,
Estimating Projective Relations in Images, describing the pin-hole
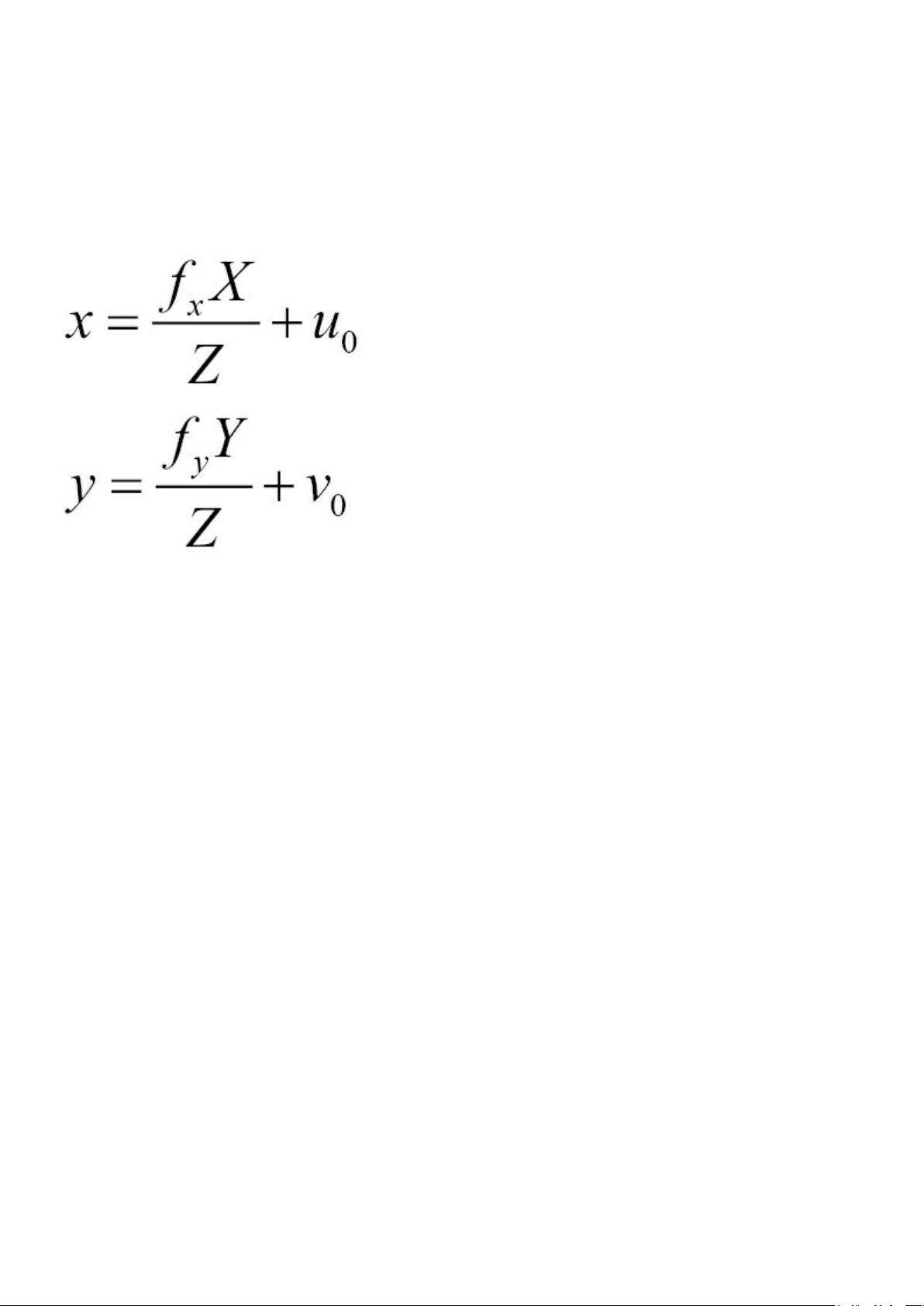
camera model. More specifically, we want to demonstrate the relation
between a point in 3D at position (X,Y,Z) and its image (x,y) on a
camera specified in pixel coordinates:

剩余40页未读,继续阅读

qq_36317069
- 粉丝: 0
- 资源: 15
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- RTL8188FU-Linux-v5.7.4.2-36687.20200602.tar(20765).gz
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0