
3 / 125Issued: 22.10.2012 Version: FBT DeviceNet KR C4 V1 en (PDF-COL)
Contents
1 Familiarization with the field bus system DeviceNet ............................... 5
1.1 Overview ....................................................................................................................5
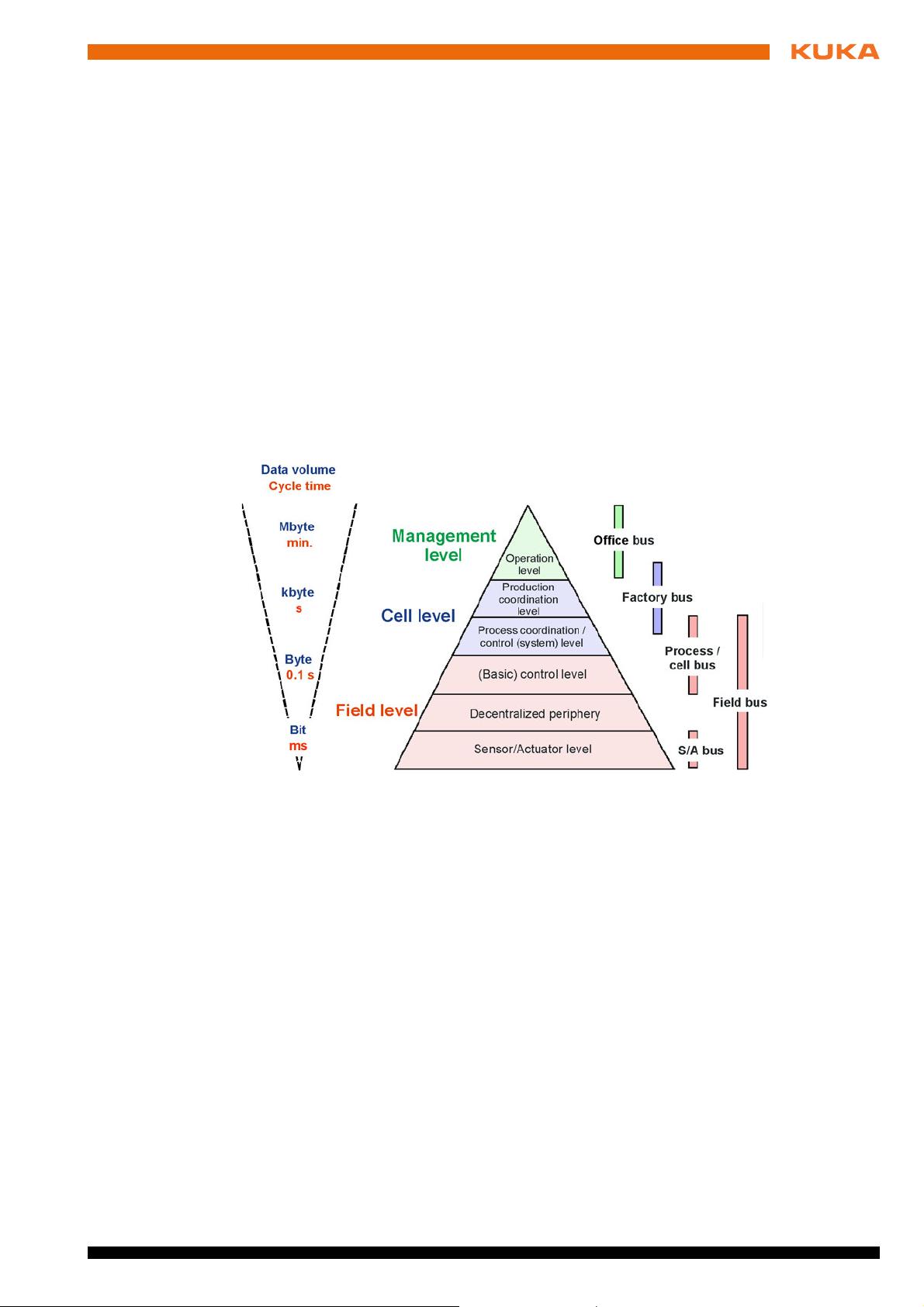
1.2 Why are field bus systems required? ......................................................................... 5
1.3 Familiarization with DeviceNet ................................................................................... 6
1.4 DeviceNet devices ..................................................................................................... 7
1.5 DeviceNet transmission media .................................................................................. 9
1.6 Which bus topologies and bus access procedures are used? ................................... 12
1.7 DeviceNet cabling ...................................................................................................... 15
1.8 Key data for DeviceNet .............................................................................................. 20
1.9 Questions: Familiarization with DeviceNet ................................................................. 20
2 Configuring the KLI ..................................................................................... 23
2.1 Overview ....................................................................................................................23
2.2 Configuring the KLI .................................................................................................... 23
2.3 Starting KLI diagnosis ................................................................................................ 27
2.4 Exercise: Configuring the KUKA Line Interface ......................................................... 29
3 Working with WorkVisual ........................................................................... 31
3.1 Overview ....................................................................................................................31
3.2 Product description .................................................................................................... 31
3.3 Graphical user interface ............................................................................................. 31
3.4 Transferring a project to the robot controller (installing) ............................................ 35
3.5 Activating a project on the robot controller ................................................................. 39
3.6 Comparing projects with WorkVisual ......................................................................... 42
3.7 Questions: Familiarization with WorkVisual ............................................................... 47
4 Integrating ESI files in WorkVisual ............................................................ 49
4.1 Overview ....................................................................................................................49
4.2 Integrating ESI device description files in WorkVisual ............................................... 49
4.3 Exercise: Installing ESI drivers .................................................................................. 51
5 Configuring the KR C4 as DeviceNet master ............................................ 53
5.1 Overview ....................................................................................................................53
5.2 General description .................................................................................................... 53
5.2.1 KR C4 DeviceNet interfaces ................................................................................. 53
5.3 Master configuration description ................................................................................ 55
5.3.1 EtherCAT field bus system ................................................................................... 55
5.3.2 Description ............................................................................................................ 57
5.3.3 Preparation for physical configuration .................................................................. 58
5.3.4 Physical configuration ........................................................................................... 64
5.3.5 Preparing input and output data words ................................................................. 74
5.3.6 Working with the signal editor ............................................................................... 76
5.3.7 Working with the mapping editor .......................................................................... 80
5.3.8 Assigning long texts .............................................................................................. 83
5.3.9 Printing the I/O mapping ....................................................................................... 86
5.3.10 I/O mapping options .............................................................................................. 87
5.4 Exercise: Configuring the KR C4 as controller ........................................................... 88
Contents





 我的内容管理
收起
我的内容管理
收起
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助 







评论0