PELCO-D协议中文.docx
需积分: 44 53 浏览量
更新于2023-03-16
收藏 19KB DOCX 举报
球机的控制命令分为两大类,即PTZ命令和扩展命令。PTZ命令主要执行云台的“上”、“下”、“左”、“右”和镜头的“变倍”、“变焦”、“光圈”等控制;扩展命令则控制云台的预置、巡视等功能。
PELCO_D 通信协议
1、 数据格式
采用 RS485 通信,1 位起始位、8 位数据、1 位停止位,无效验位。
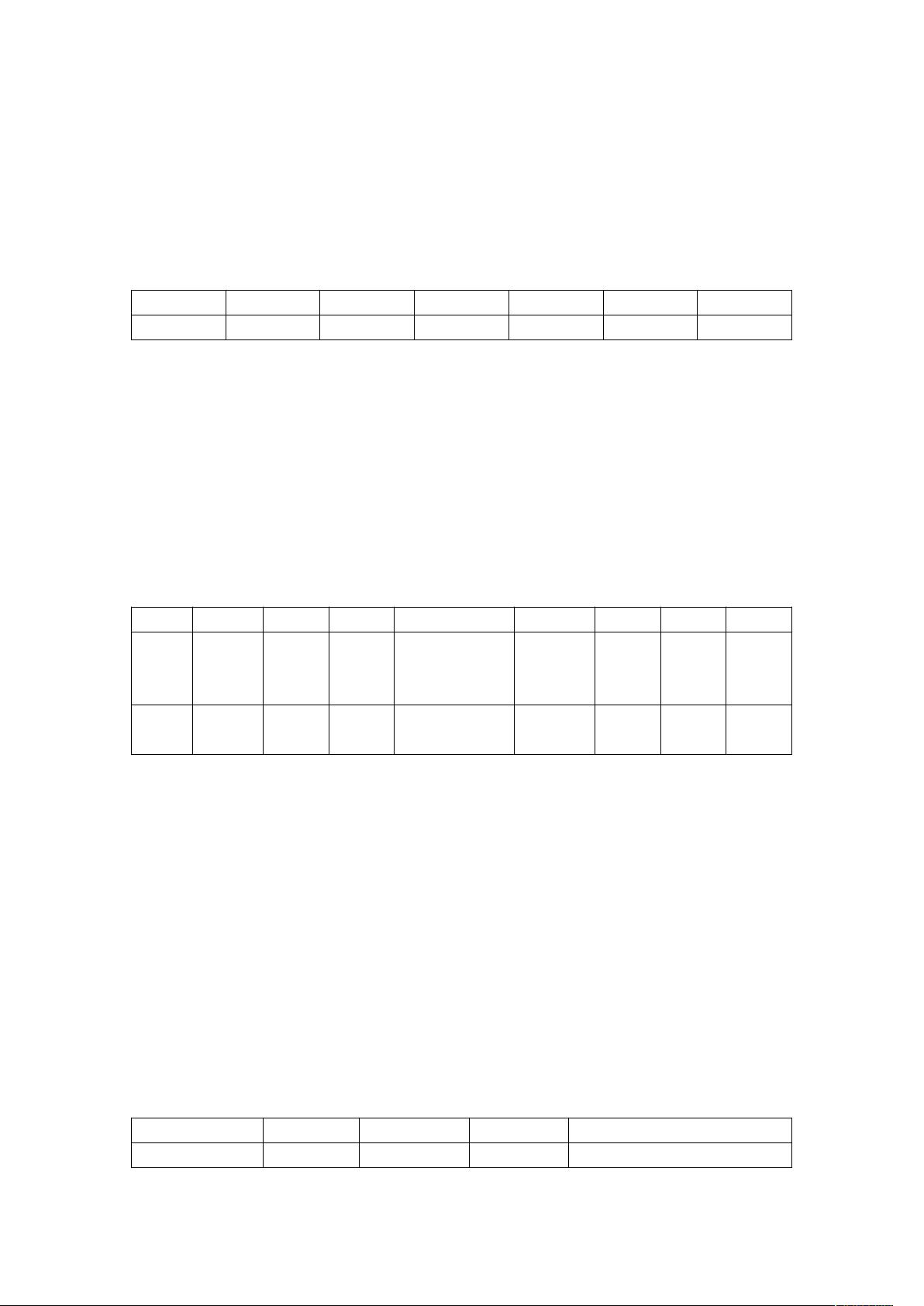
2、命令格式(一个数据包的代码长度为固定的 7 字节)
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
同步 地址 指令 1 指令 2 数据 1 数据 2 检验和
同步字节为“0xFF”
地址字节为通信的那台设备的逻辑地址“0x00-0x1F”
校验和是指 Byte2 到 Byte6 的和
校验码= MOD[(字节 2 +字节 3 +字节 4 +字节 5 +字节 6)/100H]
3、命令注解
球机的控制命令分为两大类,即 PTZ 命令和扩展命令。PTZ 命令主要执行云台的“上”、
“下”、“左”、“右”和镜头的“变倍”、“变焦”、“光圈”等控制;扩展命令则控制云台的预置、巡
视等功能。
4、PTZ 命令(PAN/TILT/ZOOM)
Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
指 令
1
Sense
预留 预留
Auto/Manual
Scan(自动/手
动)
Camera
ON/OFF
光圈关 光圈开 聚焦近
指 令
2
聚焦远 变倍大 变倍小 下 上 左 右 恒 0
注:云台自动由指令 1 的 bit7 和 bit4 控制,指令为 0x90 时,自动开。
数据 1:控制水平方向速度 0x00-0x3F
数据 2:控制垂直方向速度 0x00-0x3F
PTZ 命令控制说明:
a、当控制云台水平、上下方向动作或“IRIS”、“FOCUS”、“ZOOM”时
需要使相应的控制位为“1”,不用控制的相应位置为“0”
b、当需要云台 PAN/TILT 两方向同时动作时,只需将 PAN/TILT 的相应控制位
置“1”即可,PAN/TILT 的速度控制由 WORD5/WORD6 决定
c、将 WORD3、WORD4 的所有位置为“0”可以停止云台的动作
d、Byte3-6 全为“0”时为停止指令。
5、扩充命令
指令
Byte 3 Byte 4 Byte 5 Byte 6
设置预置点
00 03 00
00H~3FH(设置数)
下载后可阅读完整内容,剩余1页未读,立即下载
2009-05-08 上传
2022-09-20 上传
2009-09-02 上传
2008-11-27 上传
2022-09-23 上传

daeduofen
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







