
讲述骨骼动画的资料很多,但大部分都是针对 或 的
进行讲解。我觉得对于骨骼动画初学者增加了不必
要的负担,还没有理解骨骼动画的实质就已被 复杂的架构搞得
晕头转向了。这篇文章把注意力集中在骨骼动画的基本组成结构和
原理上,并实现了一个最简单纯手工的自定义骨骼动画例子帮助理
解(使用最简单的 指令,甚至没有使用矩阵)。这篇文章
在我学习理解骨骼动画的过程中逐步完善,是对这个技术的理解总
结,属于学习笔记。学习过程中参考了很多资料,其中给我启发最
大的是 写的”
!。由于本人自身也是初学者,所以错误和不
精 确 的 地 方 在 所 难 免 , 欢 迎 指 正 和 讨 论 , 请 发 邮 件 到
"#$"
或 加 入 " 邮 件 列 表 : %&&
"#''('&'"(( 。 另 外 文
本 不 涉 及 任 何 高 级 骨 骼 动 画 技 术 , 也 不 涉 及 架 构 的
技术和硬件加速,但本文中会引用
中 的 约 定 俗 成 的 名 词 , 如 )*+ , ,-
+ 等。
.
一) 模型动画基本原理和分类
.
模型动画的基本原理是让模型中各顶点的位置随时间变化。主要
种类有 动画,关节动画和骨骼蒙皮动画/0。
从动画数据的角度来说,三者一般都采用关键帧技术,即只给出关
键帧的数据,其他帧的数据使用插值得到。但由于这三种技术的不
同,关键帧的数据是不一样的。
.
(渐变,变形)动画是直接指定动画每一帧的顶点位置,其
动画关键中存储的是 所有顶点在关键帧对应时刻的位置。
.
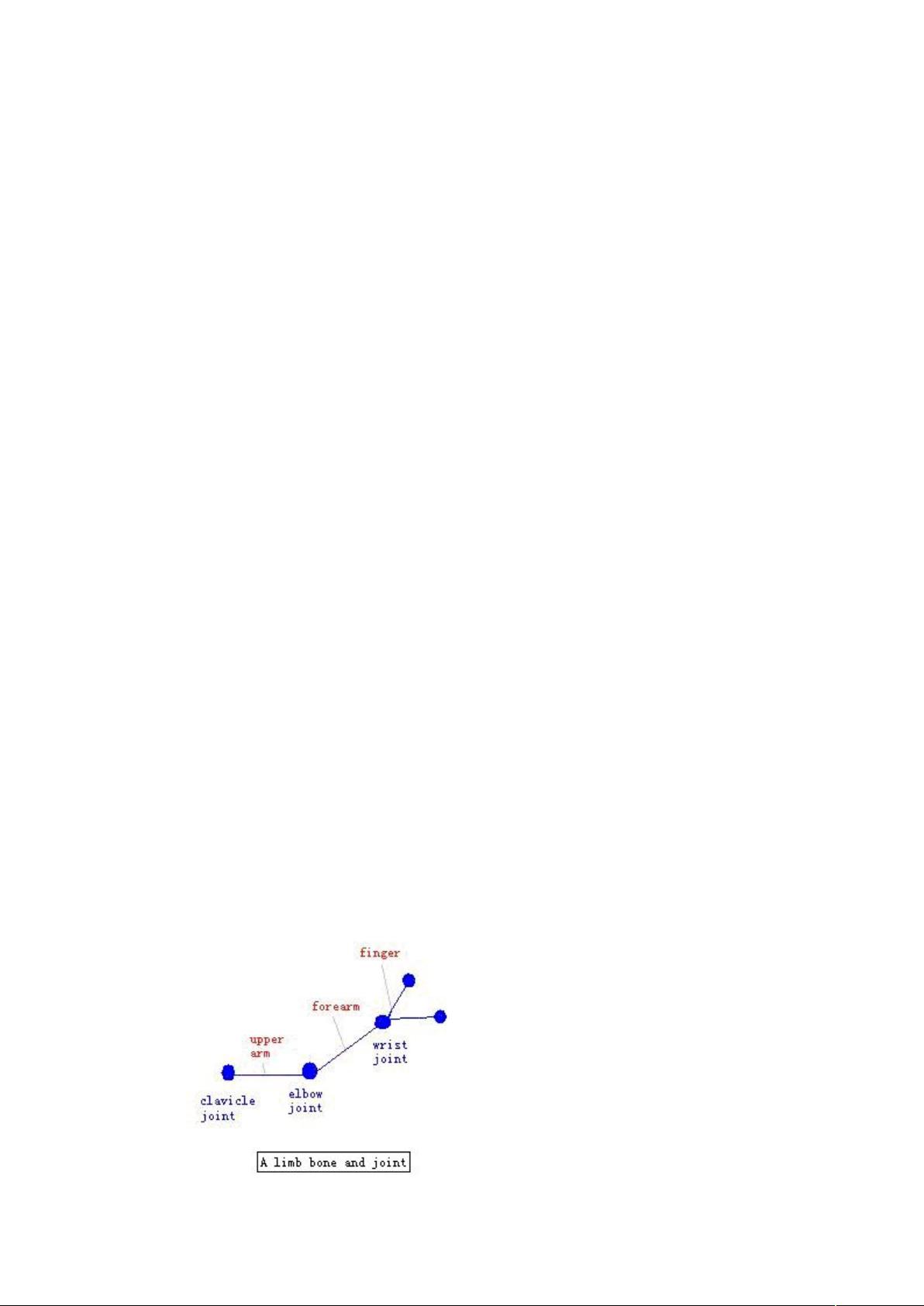
关节动画的模型不是一个整体的 1而是分成很多部分/0,
通过一个父子层次结构将这些分散的 组织在一起,父
带动其下子 的运动,各 中的顶点坐标定义在自己的坐
标系中,这样各个 是作为一个整体参与运动的。动画帧中设
置各子 相对于其父 的变换(主要是旋转,当然也可包
括移动和缩放),通过子到父,一级级的变换累加(当然从技术上,
如果是矩阵操作是累乘)得到该 在整个动画模型所在的坐标



剩余23页未读,继续阅读

ssdutabbot
- 粉丝: 5
- 资源: 3
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- stc12c5a60s2 例程
- Android通过全局变量传递数据
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论1