目 录
1. 适用范围 ........................................................................... 1
2. 概要 ............................................................................... 1
2-1 Modbus 通信规格 .......................................................................... 1
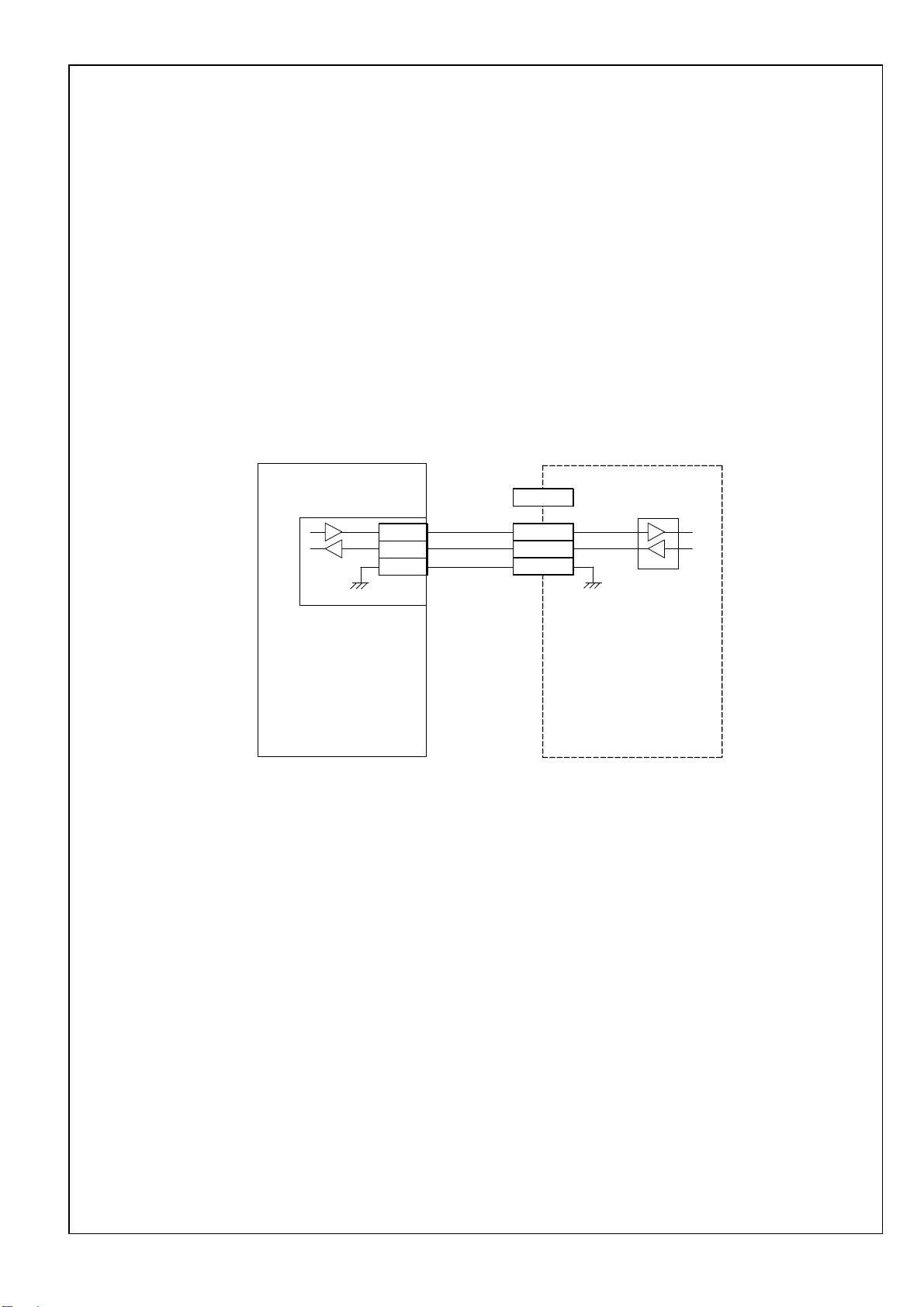
2-1-1 通信线路的连接 ....................................................................... 1
2-1-2 通信规格 ............................................................................. 3
2-1-3 通信时序 ............................................................................. 3
2-1-4 Modbus 数据结构 ..................................................................... 5
2-1-4-1 发送命令(主站→从站) ...................................................... 5
2-1-4-2 功能码详细 ................................................................. 7
2-1-4-3 线圈信息 .................................................................. 11
2-1-4-4 寄存器信息 ................................................................ 14
2-2 Block motion 功能的基本规格 ............................................................. 21
2-3 初始设置与限制事项 ...................................................................... 21
2-4 各种停止时序动作设置 .................................................................... 22
3. Block 参数 ........................................................................ 25
3-1 动作设置参数 ............................................................................ 25
3-2 Block 数据 .............................................................................. 27
3-2-1 Block[n].命令构成 ................................................................... 27
3-2-2 Block[n].数据构成 ................................................................... 27
3-2-3 Block 数据配置 ...................................................................... 28
4. 命令 .............................................................................. 32
4-1 命令一览 ................................................................................ 32
4-2 相对位置定位 ............................................................................ 33
4-3 绝对位置定位 ............................................................................ 34
4-4 回原点 .................................................................................. 35
4-5 减速停止 ................................................................................ 37
4-6 速度更新 ................................................................................ 38
4-7 减法计数器启动 .......................................................................... 39
4-8 输出信号操作 ............................................................................ 40
4-9 跳转 .................................................................................... 41
4-10 条件转移 ............................................................................... 42
4-11 Block 迁移和结束 ....................................................................... 44
4-11-1 Block 迁移条件 ..................................................................... 44
4-11-2 Block motion 的结束 ................................................................ 44
5. Block motion 例 ................................................................... 45
6. Block motion 功能有効时可检测的保护功能 ............................................ 46
6-1 Block motion 功能有効时可检测的保护功能一览 ............................................. 46
6-2 Block motion 功能有効时可检测的保护功能详解 ............................................. 46
7. 参数一览 ......................................................................... 48


 我的内容管理
收起
我的内容管理
收起
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助 







评论1