
Deep Reinforcement Learning in Large Discrete Action Spaces
Gabriel Dulac-Arnold*, Richard Evans*, Hado van Hasselt, Peter Sunehag, Timothy Lillicrap, Jonathan Hunt,
Timothy Mann, Theophane Weber, Thomas Degris, Ben Coppin DULACARNOLD@GOOGLE.COM
Google DeepMind
Abstract
Being able to reason in an environment with a
large number of discrete actions is essential to
bringing reinforcement learning to a larger class
of problems. Recommender systems, industrial
plants and language models are only some of the
many real-world tasks involving large numbers
of discrete actions for which current methods are
difficult or even often impossible to apply.
An ability to generalize over the set of actions
as well as sub-linear complexity relative to the
size of the set are both necessary to handle such
tasks. Current approaches are not able to provide
both of these, which motivates the work in this
paper. Our proposed approach leverages prior
information about the actions to embed them in
a continuous space upon which it can general-
ize. Additionally, approximate nearest-neighbor
methods allow for logarithmic-time lookup com-
plexity relative to the number of actions, which is
necessary for time-wise tractable training. This
combined approach allows reinforcement learn-
ing methods to be applied to large-scale learn-
ing problems previously intractable with current
methods. We demonstrate our algorithm’s abili-
ties on a series of tasks having up to one million
actions.
1. Introduction
Advanced AI systems will likely need to reason with a large
number of possible actions at every step. Recommender
systems used in large systems such as YouTube and Ama-
zon must reason about hundreds of millions of items every
second, and control systems for large industrial processes
may have millions of possible actions that can be applied
at every time step. All of these systems are fundamentally
*Equal contribution.
reinforcement learning (Sutton & Barto, 1998) problems,
but current algorithms are difficult or impossible to apply.
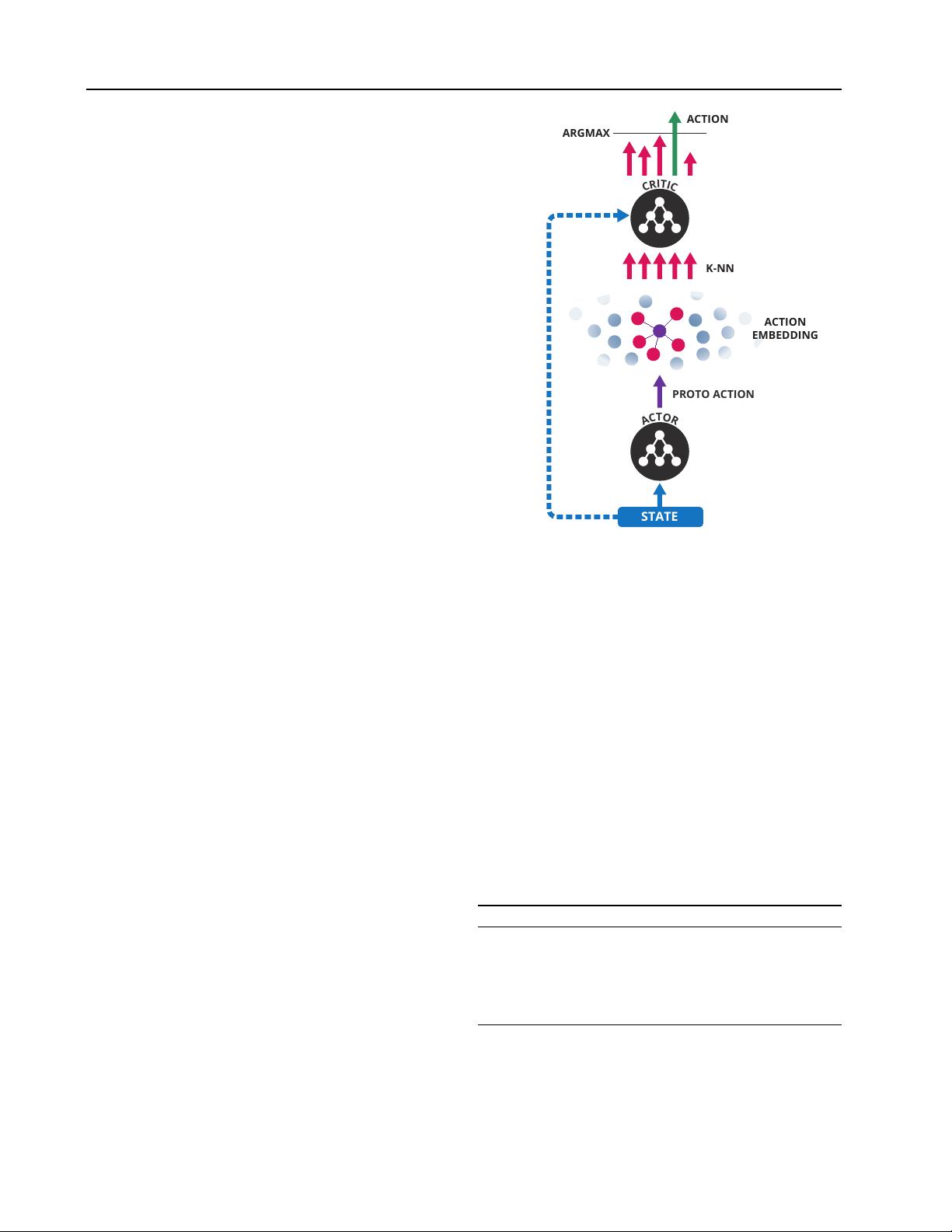
In this paper, we present a new policy architecture which
operates efficiently with a large number of actions. We
achieve this by leveraging prior information about the ac-
tions to embed them in a continuous space upon which the
actor can generalize. This embedding also allows the pol-
icy’s complexity to be decoupled from the cardinality of
our action set. Our policy produces a continuous action
within this space, and then uses an approximate nearest-
neighbor search to find the set of closest discrete actions
in logarithmic time. We can either apply the closest ac-
tion in this set directly to the environment, or fine-tune this
selection by selecting the highest valued action in this set
relative to a cost function. This approach allows for gen-
eralization over the action set in logarithmic time, which is
necessary for making both learning and acting tractable in
time.
We begin by describing our problem space and then detail
our policy architecture, demonstrating how we can train it
using policy gradient methods in an actor-critic framework.
We demonstrate the effectiveness of our policy on various
tasks with up to one million actions, but with the intent that
our approach could scale well beyond millions of actions.
2. Definitions
We consider a Markov Decision Process (MDP) where A is
the set of discrete actions, S is the set of discrete states, P :
S ×A×S → R is the transition probability distribution,
R : S ×A → R is the reward function, and γ ∈ [0, 1] is
a discount factor for future rewards. Each action a ∈ A
corresponds to an n-dimensional vector, such that a ∈ R
n
.
This vector provides information related to the action. In
the same manner, each state s ∈ S is a vector s ∈ R
m
.
The return of an episode in the MDP is the discounted
sum of rewards received by the agent during that episode:
R
t
=
P
T
i=t
γ
i−t
r(s
i
, a
i
). The goal of RL is to learn a
policy π : S → A which maximizes the expected return
over all episodes, E[R
1
]. The state-action value function
Q
π
(s, a) = E[R
1
|s
1
= s, a
1
= a, π] is the expected re-
arXiv:1512.07679v2 [cs.AI] 4 Apr 2016

剩余10页未读,继续阅读

西希
- 粉丝: 0
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
- MW全能培训汽轮机调节保安系统PPT教学课件.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0