
P_532
DS-CV/EET
Y445 S00 728-V42 Confidential
Keyword Protocol 2000
KW2000 - 1791 -
ComVar - kw2000
21.10.2005 kwp2000_overview.fm
© Robert Bosch GmbH reserves all rights even in the event of industrial property rights. We reserve all rights of disposal such as copying and passing on to third parties.
14 Keyword Protocol 2000 (KW2000)
Function group: Keyword-Protocol 2000
KWP2000
Overview of the component The main purpose of diagnostic software is to retrieve diagnostic information from the ECU to the external
tester equipment. Currently, the physical media ETK emulation memory interface, CAN and K-line can be
serviced, but future extensions are possible. The software fulfils the concerning diagnostic and emission
related system systems for road vehicles according to the ISO, CARB and SAE specifications.
Besides the application of diagnosis the communication software is als used for:
• Programming software aund data into flash memory devices
• End of line programming
• OnBoard-Diagnosis using functional addressing for emission related ECUs
• Factory tests to verify the functionality of all hardware devices
• Remote Control for simulation and software test which is useful during the software development stage
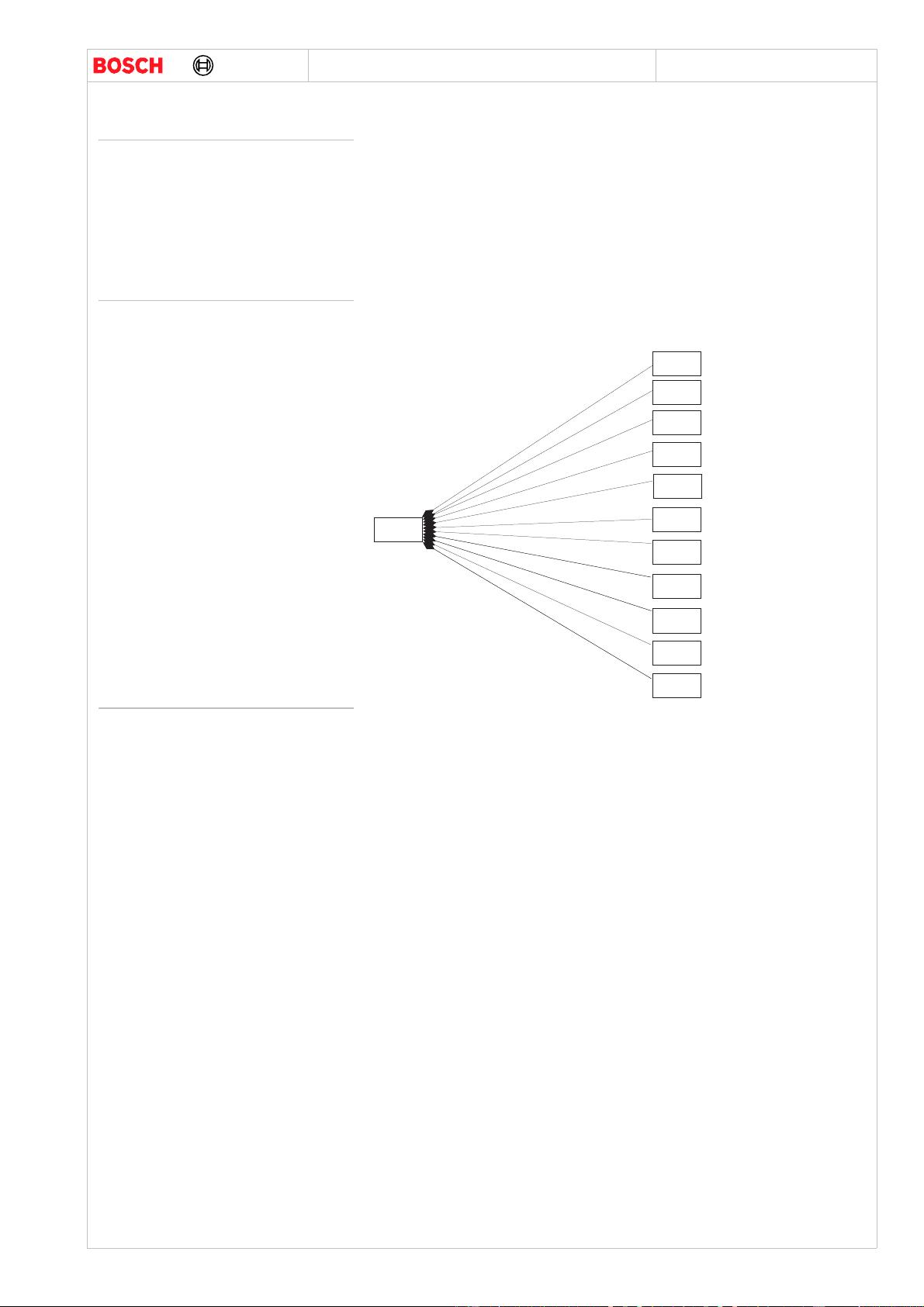
Structure of the component The kw2000 component consists the project specific services in subcomponent.
Figure 1624 : Subcomponents of project specific kw2000 services
Subfunctions
See “Keyword Protocol 2000 Implementation (kwp2000)” on page 1792.
See “KWP 2000 diagnosis on CAN implementation (DiagOnCAN)” on page 1801.
See “Keyword protocol 2000 flash programming (kwp2000_flash)” on page 1804.
See “startCommunication SID $81 (K2STC)” on page 1862.
See “stopCommunication SID $82 (K2SPC)” on page 1863.
See “accessTimingParameters SID $83 (K2ATP)” on page 1864.
See “ReadEcuIdentification SID $1A (K2REI)” on page 1819.
See “startDiagnosticSession SID $10 (K2STDS)” on page 1810.
See “testerPresent SID $3E (K2TP)” on page 1858.
See “ecuReset SID $11 (K2ER)” on page 1812.
See “securityAccess SID $27 (K2SECA)” on page 1829.
See “Reading ECU data (ReadDataByLocalIdentifier SID $21) (K2RDLI)” on page 1822.
See “writeDataByLocalIdentifier service SID $3B (K2WRDLI)” on page 1855.
See “dynamicallyDefineLocalIdentifier SID $2C (K2DDLI)” on page 1834.
See “readDiagnosticTroubleCodesByStatus SID $18 (K2RDTCBS)” on page 1817.
See “ReadStatusOfDiagnosticTroubleCodes SID $17 (K2RSODTC)” on page 1815.
See “ClearDiagnosticInformation SID $14 (K2CDI)” on page 1814.
See “readMemoryByAddress SID $23 (K2RMBA)” on page 1828.
See “requestRoutineResultsByLocalIdentifier SID 33 (K2RRRBLI)” on page 1849.
See “startRoutineByLocalIdentifier SID 31h (K2STRBLI)” on page 1844.
See “stopRoutineByLocalId (SID 32h) (K2SPRBLI)” on page 1847.
See “escapeCode (SID 80) (K2ESC)” on page 1859.
See “Write memory by address (SID 3D) (K2WMBA)” on page 1857.
See “Input/output control (InputOutputControlByLocalId SID $30) (K2IOCBLI)” on page 1836.
See “Request download (SID 34) (K2RQDN)” on page 1851.
See “Request upload (SID 35) (K2RQUP)” on page 1852.
See “Transfer data (SID 36) (K2TD)” on page 1853.
See “Request transfer exit (SID 37) (K2RTE)” on page 1854.
See “Communication Control SID $28 (ISO14229_CC)” on page 1831.
k w 2 0 0 0
k 2 c v l i b
k 2 s r b l i
k 2 s e c a
k 2 e s c
k 2 r r r b l i
k 2 r e i
k 2 r s o d t c
k 2 s p r b l i
k 2 c d i
k 2 r d t c b s
k 2 c c
剩余79页未读,继续阅读

X@B
- 粉丝: 55
- 资源: 9
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
- MW全能培训汽轮机调节保安系统PPT教学课件.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0