PLC控制的机械手程序设计与应用
"本文主要介绍了如何使用PLC(可编程逻辑控制器)来控制机械手的运动,特别是基于日本三菱FX2N-48MR型号的PLC在机械手搬运控制系统中的应用。文中详细阐述了机械手的结构和控制要求,包括各个动作的执行通过电磁阀驱动气缸来实现,以及各种工作模式的实现方式。此外,还探讨了PLC的I/O分配,以及在设计PLC程序时的总体结构和各个部分程序的设计,包括公用程序、自动程序、手动程序和回原位程序的编写逻辑。"
在机械手控制系统中,PLC扮演着核心角色,负责根据预设的程序控制机械手的动作,确保其准确、高效地执行任务。FX2N-48MR型PLC具有丰富的输入输出接口,能够适应多种控制需求。在I/O分配中,18个输入设备(如限位开关)和5个输出设备(如电磁阀线圈)与PLC连接,实现对机械手的实时监控和控制。
程序设计方面,PLC程序通常采用梯形图形式,分为公用程序、自动程序、手动程序和回原位程序四大部分。公用程序是所有工作模式的基础,用于判断机械手是否位于原位,并处理工作模式切换时的辅助继电器复位。自动程序包含了单步、单周期和连续工作模式,它们的执行顺序相同,通过跳转指令避免不同工作模式间的冲突。手动程序则允许通过操作面板上的按钮直接控制机械手的各个动作,同时具备必要的安全联锁措施,如上升与下降、左行与右行的互锁以及限位保护。回原位程序则负责将机械手安全地返回到初始位置。
通过PLC的精确控制,机械手能在不同工作模式下稳定运行,提高生产效率,减少人工干预,同时也提高了操作的安全性和可靠性。在实际应用中,PLC程序的优化和调试是保证机械手系统性能的关键,需要结合具体任务需求进行细致的逻辑设计和测试。
机械手系统的 PLC 梯形图程序
1.程序的总体结构
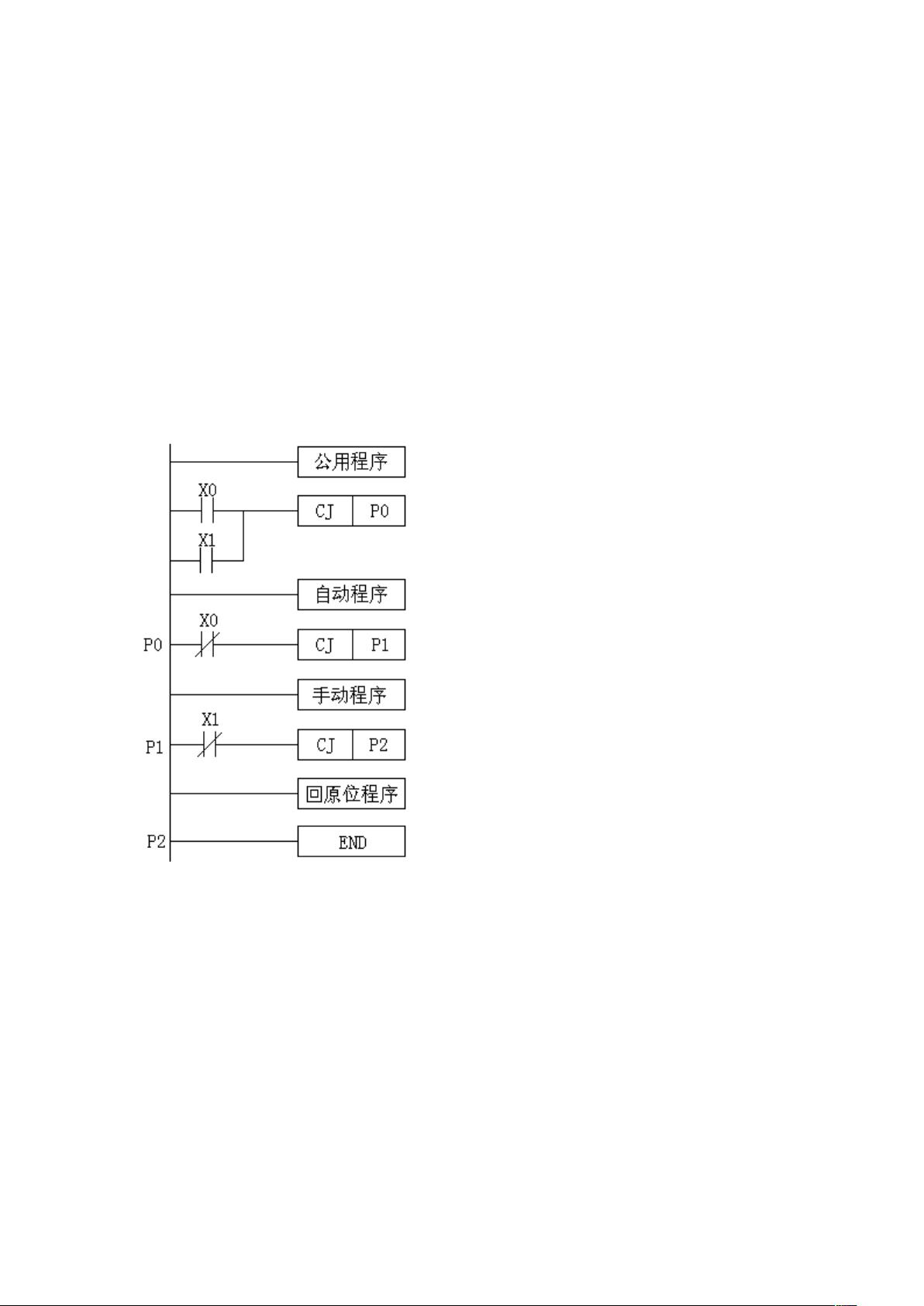
如图 6-22 所示为机械手系统的 PLC 梯形图程序的总体结构,将程序分为公用程序、自动
程序、手动程序和回原位程序四个部分,其中自动程序包括单步、单周期和连续工作的程
序,这是因为它们的工作都是按照同样的顺序进行,所以将它们合在一起编程更加简单。
梯形图中使用跳转指令使得自动程序、手动程序和回原位程序不会同时执行。假设选择“手
动”方式,则 X0 为 ON、X1 为 OFF,此时 PLC 执行完公用程序后,将跳过自动程序到 P0
处,由于 X0 常闭触点为断开,故执行“手动程序”,执行到 P1 处,由于 X1 常闭触点为闭合,
所以又跳过回原位程序到 P2 处;假设选择分“回原位”方式,则 X0 为 OFF、X1 为 ON,跳
过自动程序和手动程序执行回原位程序;假设选择“单步”或“单周期”或“连续”方式,则
X0、X1 均为 OFF,此时执行完自动程序后,跳过手动程序和回原位程序。
图 6-22 机械手系统 PLC 梯形图的总体结构
2.各部分程序的设计
(1)公用程序p 公用程序如图 6-23 所示,左限位开关 X12、上限位开关 X10 的常开触点和
表示机械手松开的 Y4 的常开触点的串联电路接通时,辅助继电器 M0 变为 ON,表示机械
手在原位。
公用程序用于自动程序和手动程序相互切换的处理,当系统处于手动工作方式时,必须
将除初始步以外的各步对应的辅助继电器(M11-M18)复位,同时将表示连续工作状态的
M1 复位,否则当系统从自动工作方式切换到手动工作方式,然后又返回自动工作方式时,
可能会出现同时有两个活动步的异常情况,引起错误的动作。
当机械手处于原点状态(M0 为 ON),在开始执行用户程序( M8002 为 ON)、系统处
下载后可阅读完整内容,剩余5页未读,立即下载
1428 浏览量
1625 浏览量
474 浏览量
694 浏览量
560 浏览量
713 浏览量
143 浏览量

jmjun
- 粉丝: 3
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







