基于Arduino开源平台的WIFI视频监控小车
市面上美国 WowWee公司推出路威(ROVIO)机器人,一个可以通过WiFi无线局域网络控制的八方移动的机器人摄像机,支持使用者利用内部网络或者通过INTERNET来进行远程遥控。通过网络,使用台式电脑、笔记本、智能手机(PDA,SMARTPHONE),PSP和WiLi遥控手柄进行控制,具有实时控制监控、声像传递、根据设定路线(path)巡航,拍照,自动EMAIL。在这里我们可以通过价廉的路由器搭建WIFI视频监控小车。加起来成本一千多元就可以搞定一台可以自己编程玩的机器人
基于 Arduino 开源平台的 WIFI 视频监控小车
市面上美国 WowWee 公司推出路威(ROVIO )机器人,一个可以通过 WiFi 无线局
域网络控制的八方移动的机器人摄像机,支持使用者利用内部网络或者通过 INTERNET 来
进 行 远 程 遥 控 。 通 过 网 络 , 使 用 台 式 电 脑 、 笔 记 本 、 智 能 手 机
(PDA,SMARTPHONE), PSP 和 WiLi 遥控手柄进行控制,具有实时控制监控、声像
传递、根据设定路线(path)巡航,拍照,自动 EMAIL。在这里我们可以通过价廉的路由
器搭建 WIFI 视频监控小车。加起来成本一千多元就可以搞定一台可以自己编程玩的机器
人。下面是材料清单:
材料清单
序号 材料名称 单价
1
A4WD 小车
205
2
ROMEO 控制板
300
3
5 节 2300MAH 电池
65
4
12V 电池包
130
5
充电器
90
6
上海贝尔 RG-100A 路由器
55
7
中星微 301 摄像头
20
8
两自由度 DF15MG 云台
259
合计:
1124
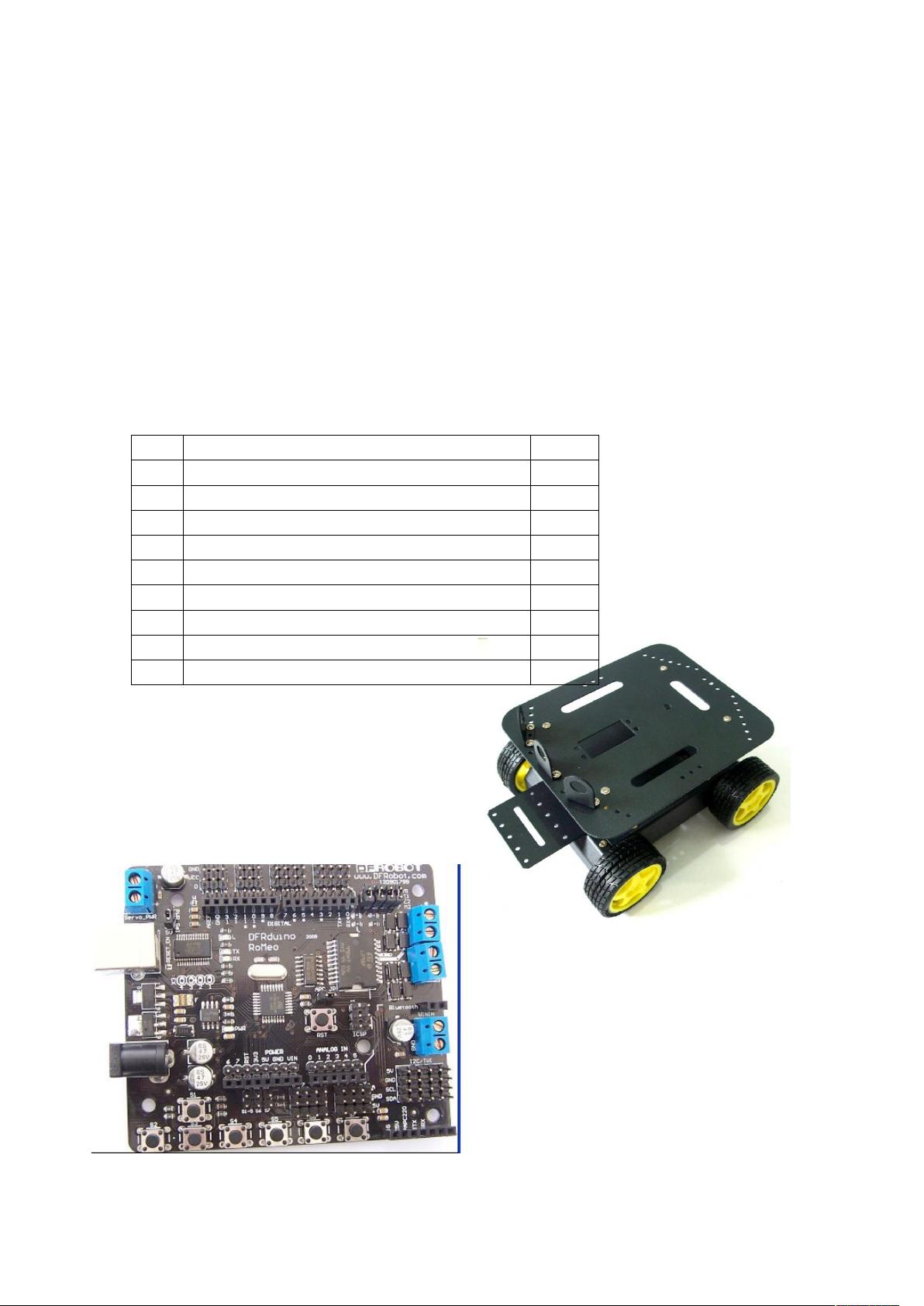
1. A4WD 是一个铝合金结构的四轮驱动小
车,每个轮子都有一个电机作为驱动,马力
强劲。首先根据小车附带的安装说明书装配
小车车体,如图就是装好的效果。
在底盘里面装了 5 节 2300MAH 的镍氢充电
电池。
2. 接下来安装 ROMEO 扩展板,ROMEO 扩
展板是一个基于 Arduino 开源平台的扩展板。
因为全球 DIY 爱好者都在使用,所以提供
了丰富的例子程序。基本上想实现的功能
都能够找到参考代码。Arduino 封装了底层
枯燥的寄存器操作,使程序开发都是基于
应用的函数调用。输入输出口的定义也是


剩余15页未读,继续阅读
1350 浏览量
108 浏览量
148 浏览量
196 浏览量
点击了解资源详情
284 浏览量
125 浏览量

沙滩小子
- 粉丝: 1
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- yet-another-emoji-support:这是IntelliJ插件,支持使用内容辅助功能在编辑器中插入表情符号
- Feel Good Browsing-crx插件
- 彩色微立体商务幻灯片图表整套下载PPT模板
- Springboot 结合Apache Spark 2.4.4与Scala 2.12 集成示例
- Template-Elsevier.zip
- SAM_BHoM:SAM与建筑物和人居物体模型(BHoM)的连接
- Hello World_java_world_gardenwew_
- d6f-2jcieev01-raspberrypi:带有评估套件2JCIE-EV01-RP1和某些Raspberry-Pi板的D6F MEMS流量传感器
- 基于图神经网络的一个天气推荐系统.zip
- angular-test-reporter:用于发布和查看自动化测试结果的应用程序,使用 AngularJS 和节点 Rest 服务器
- EPSON 20080 宣纸打印过程起皱的解决方法.rtf.zip
- GW Warp Bookmarks-crx插件
- 黑色艺术时尚图表大全PPT模板
- 前端设计模式:设计模式
- palm:with使用背包钥匙扣提醒您过度紫外线辐射:old_key:
- sqj-star.github.io
