ROS基础教程:从命令到工作流详解
本篇文档是关于ROS(Robot Operating System,机器人操作系统)的学习资料整理,针对的是初级阶段的学习者。作者Li Gaofeng,来自南京大学,提供了详细的教程和指南,帮助读者逐步掌握ROS的基础知识。
1. **基本命令**:文档首先介绍了ROS的基本命令,这是接触ROS的第一步,包括但不限于工作空间(Workspace)、包(Package)的管理以及编译操作。
2. **创建工作空间(catkin Workspace)**:讲解了如何创建和管理工作空间,它是一个组织和管理ROS项目的结构,包含了编译环境和依赖关系的管理。
3. **创建包**:详细解释了包的构成,包括包结构、包与工作空间的关系,以及如何创建一个标准的catkin包,包括`package.xml`文件的作用和配置。
4. **编译包**:阐述了编译ROS包的过程,这是实际应用前的必要步骤,确保代码能够被正确地构建和链接。
5. **理解ROS节点**:定义了关键概念如客户端库、`roscore`和`rosnode`,并通过实例演示如何启动和使用这些工具。
6. **话题(Topics)**:通过实例如键盘控制乌龟,介绍了ROS中的数据发布/订阅机制(Topics),并展示了如何使用`rostopic`命令来管理话题。
7. **服务(Services)和参数(Parameters)**:区分了服务和参数的概念,讲解了如何使用`rosservice`、`rosparam`等命令来调用服务和管理参数。
8. **rqt_console和roslaunch**:提到了rqt(RQT,Robot Operating System Interactive Console)和`roslaunch`工具的安装和使用,这两个工具在ROS开发中用于交互式监控和任务启动。
整个文档涵盖了ROS基础架构的关键部分,适合新手通过实践来理解ROS的核心功能和工作流程。随着深入学习,读者将能更好地构建和管理复杂的机器人系统。
ROS 官网学习资料整理 1-初级阶段
9
Version:1.0;Date:20140430;Author:LiGaofeng,NKU
contacting node http://machine_name:54614/ ...
Pid: 5092
(Note:在打开新的 terminal 时不要关掉最初的那个 terminal,因为关掉 terminal 的话原先运行的
Master节点也被关闭了。如果碰到这种情况,在运行rosnode list时会发现报错:cann’t communicatewith
Master。解决方法是:运行 roscore 命令开启 Master,然后再重新打开一个 terminal)
5.5 用 rosrun.
rosun 命令能够直接利用包名运行一个节点,而不需要知道包的路径:(问题:包与节点的关系是什
么?)
$ rosrun [package_name] [node_name]
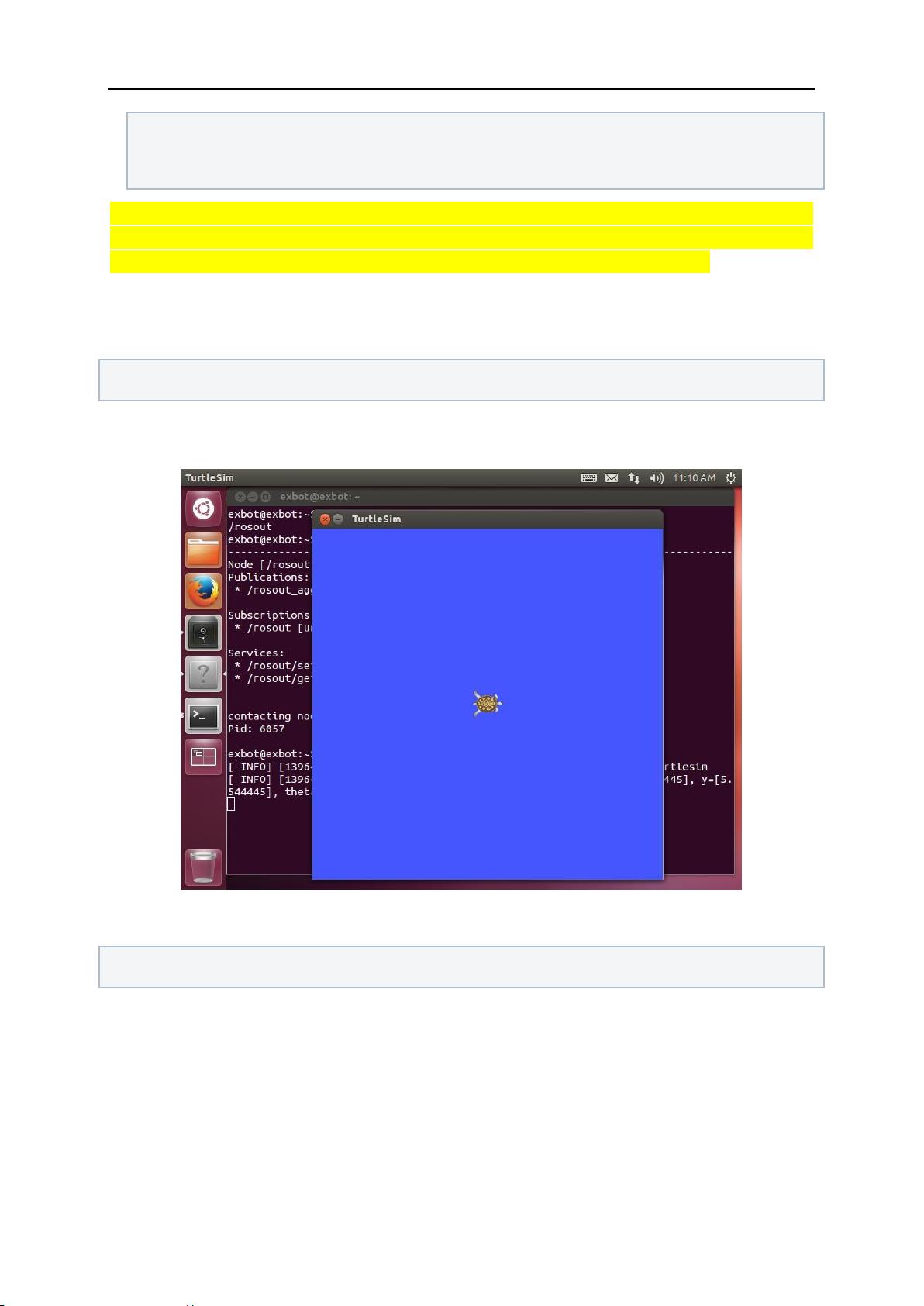
现在我们可以运行 turtlesim 包中的 turtlesim_node 试试小乌龟的仿真程序:
我的运行效果如下:
这时候再新开一个 terminal 运行 rosnode list 命令会发现多了一个 turtlesim 节点。
你还可以用下面命令更改节点的名字
$ rosrun turtlesim turtlesim_node __name:=my_turtle
新的效果图:
剩余47页未读,继续阅读
431 浏览量
点击了解资源详情
389 浏览量
829 浏览量
308 浏览量
2405 浏览量
431 浏览量
115 浏览量
136 浏览量

o_ha_yo_yepeng
- 粉丝: 156
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机常用英语单词速查宝典
- Apache HTTP Server 2.2.19: 构建百万访问量级Web服务器
- 开源国际象棋评级系统:实现USCF评级算法
- 官方最新2012-08-01 Keil C8051F仿真调试驱动程序发布
- 乐视直播平台的TVlist6功能解析
- GDXPunk:Java游戏引擎,融合libGDX与Flashpunk精髓
- Django搭建简易博客教程与实例分析
- DDRManiak开源克隆版:FlashLite手机上的舞蹈游戏
- 深入探讨Spring 2.5及Java语句学习笔记
- Java版俄罗斯方块豪华学习教程
- MFC应用实现:鼠标绘制圆形与椭圆形教程
- 海美迪HiTV3.0电视直播软件功能介绍
- Mogwai图形工具:3D场景编辑中的Gizmo实用程序
- 双峰山旅游景点导游系统设计方案研究
- CPSokoban开源推箱子游戏发布1.0版本
- 哈夫曼树应用教程:源代码与示例文件下载
