
智能避障遥控小车设计
专业:电子信息工程 学生: 指导教师:
摘要:在全球智能化浪潮中,智能车辆的研发 呈现出蓬勃发展的良好态势。本设计主要以
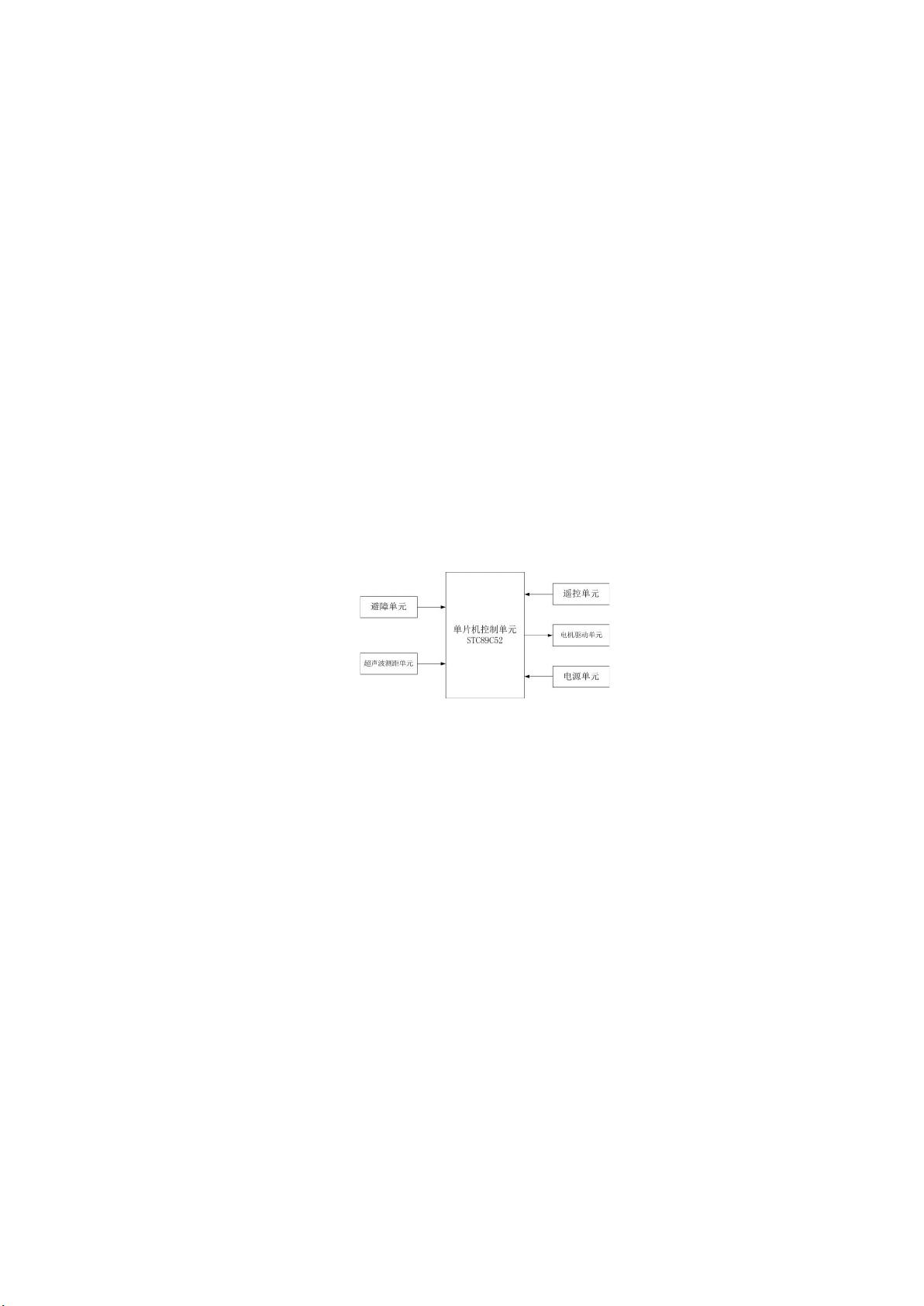
STC89C52 单片机为控制核心,通过无线遥控实现小车的前进后退和转向行驶;通过红外光电传
感器,实现小车自动避障等功能;结合超声波模块,附加 LCD1602 可以实时显示出小车距离障
碍物的距离。系统程序采用 C 语言编程,通过实现各个子单元的功能来完成智能小车的整体设
计。
关键词: 智能;单片机;无线遥控;自动避障
1.引 言
智能化作为现代社会的新产物,作为以后的发展方向,它可以按照预先设定的模式在一个
特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
在上世纪 50 年代时,美日等国家开始了对无人驾驶汽车的相关研究。作为全世界科技最发
达的国家,美国交通部投入 3500 万美元作为研究无人驾驶汽车的专项费用,并与通用公司合作
研发一种防碰撞系统。除此之外,其他一些研究机构也和大学合作进行研发无人驾驶车辆;据
相关报道,美国军方准备采用无人车执行危险地带执勤任务。日本的三菱公司和尼桑公司正在
研发各类防撞设备,并有望于近 2 年内投产。我国也早已开始无人车的研究工作,如清华大学
汽车研究所对导航、车内控制系统等方面做了深入的研究;国防科大研制成功最高时速达到
75.6 公里的无人驾驶汽车。国内各高校对无人驾驶汽车的研究也更加深入。越来越多的研究机
构和学者在不断的参与智能车的研究,可以预计,我国的智能车辆研究必将会取得较大进步。
因此,对智能小车进行深入细致的研究,不但能加深理解课堂上学到的理论知识,更能将理论
转化为实际运用,为将来工作打下坚实的基础。现在有许多大学已经开展了相关的智能车竞赛,
比赛涉及到电子、控制、机械等多学科,学生可以在比赛过程中学习到程序设计、电路仿真、
控制模拟等许多知识,对于自身的能力提升和综合素质全面发展具有非常大的益处,反过来智
能车竞赛又促进了智能车研究的发展和普及。
如今知识工程、计算机科学、机电一体化和工业一体化等许多领域都在讨论智能系统,人
们要求系统智能化程度也在不断提高。显然传统的控制观念是无法满足人们的需求,我们可以
将智能控制与传统控制结合起来,以此来提高人们的满意度。随着人工智能技术、计算机技术、
自动控制技术的迅速发展,智能控制必将迎来它的发展新时代
[1]
。相信在不久的将来,智能车辆
技术已达会有一个飞速的发展,智能车辆将在世人面前展现其无穷的魅力。
一般而言,智能车系统要求小车在白色的场地上,通过控制小车的转向角和车速,使小车能自动
地沿着一条任意给定的黑色带状引导线行驶
[2]
。本课题主要开发一个能够自动避障、无线电遥控
和超声波测距的智能小车控制系统。系统主要以简易玩具模型车为开发平台,选择常见的玩具
直流电机模型车为机械平台,选择物美价廉的 STC89C52 单片机为控制平台,认真分析本系统
的各项需要实现的功能,结合传感器技术、电机控制技术和液晶显示等相关知识来使小车完成

剩余16页未读,继续阅读

ludy1988
- 粉丝: 3
- 资源: 5
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 2023年中国辣条食品行业创新及消费需求洞察报告.pptx
- 2023年半导体行业20强品牌.pptx
- 2023年全球电力行业评论.pptx
- 2023年全球网络安全现状-劳动力资源和网络运营的全球发展新态势.pptx
- 毕业设计-基于单片机的液体密度检测系统设计.doc
- 家用清扫机器人设计.doc
- 基于VB+数据库SQL的教师信息管理系统设计与实现 计算机专业设计范文模板参考资料.pdf
- 官塘驿林场林防火(资源监管)“空天地人”四位一体监测系统方案.doc
- 基于专利语义表征的技术预见方法及其应用.docx
- 浅谈电子商务的现状及发展趋势学习总结.doc
- 基于单片机的智能仓库温湿度控制系统 (2).pdf
- 基于SSM框架知识产权管理系统 (2).pdf
- 9年终工作总结新年计划PPT模板.pptx
- Hytera海能达CH04L01 说明书.pdf
- 数据中心运维操作标准及流程.pdf
- 报告模板 -成本分析与报告培训之三.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论3