基于图像识别的机械臂设计:Matlab与Arduino协同的物料分拣系统
版权申诉
114 浏览量
更新于2024-06-21
收藏 8.25MB DOCX 举报
在21世纪的科技浪潮中,图像识别技术日益成为自动化生产的重要驱动力。本文聚焦于"基于图像识别的物料分拣系统——机械臂设计与控制定稿"这一主题,旨在研发一款能够高效分拣物料的机械臂。该系统结合了Matlab图像识别算法,通过精确识别物料类别,实现了智能化的物料分类过程。
本文的核心部分首先介绍了机械臂的选择,特别关注了一个具有四个自由度的机械臂,这样的设计提供了足够的灵活性以适应各种物料的分拣需求。机械臂的机械结构设计是关键步骤,需要考虑负载能力、运动精度和可靠性等因素,这涉及到机构设计和静力学分析,确保其在实际操作中的稳定性和效率。
SolidWorks的Simulation软件在这个过程中扮演了关键角色,它被用来进行有限元分析(FEM)。通过这种方式,研究人员能够评估机械臂在承受负载时的应力分布和结构强度,从而验证其设计的合理性并优化可能存在的问题。这一步骤对于确保机械臂在实际应用中的性能至关重要。
机械臂的控制部分采用了Arduino开发板,这是一种广泛应用的微控制器平台,适合进行简单的电子控制。通过脉宽调制(PWM)信号,Arduino可以精准地控制舵机,舵机的旋转角度会根据接收到的不同脉冲宽度指令进行调整。这种控制方式确保了机械臂的动作精度和响应速度。
关键词"SolidWorks有限元分析"表明了在设计过程中对结构强度和性能的严谨考量,而"Arduino控制系统"则揭示了机械臂的智能化核心。"PWN脉冲"进一步明确了控制信号的传输方式,以及"舵机"作为执行器的角色。此外,Proteus仿真软件的提及则展示了作者在设计阶段对整个系统行为的预演和优化,通过软件模拟测试,使得机械臂的行为在真实环境中得到预测和改进。
本文主要探讨了从机械臂设计、静态分析、有限元仿真到控制系统的实现,以及如何通过图像识别和微控制器协作,构建出一个高效、精确的物料分拣系统。这个系统不仅提升了物料处理的自动化程度,也展示了技术进步在提升工作效率和精度方面的潜力。
6
2.机械臂本体的设计
2.1 机械臂类型方案选择
机械臂的种类繁多,首先是针对坐标形式和驱动形式,对其进行一系列的选
型,选择最为合适的方案,对整体功能实现起到关键作用。[6]
(1)坐标形式
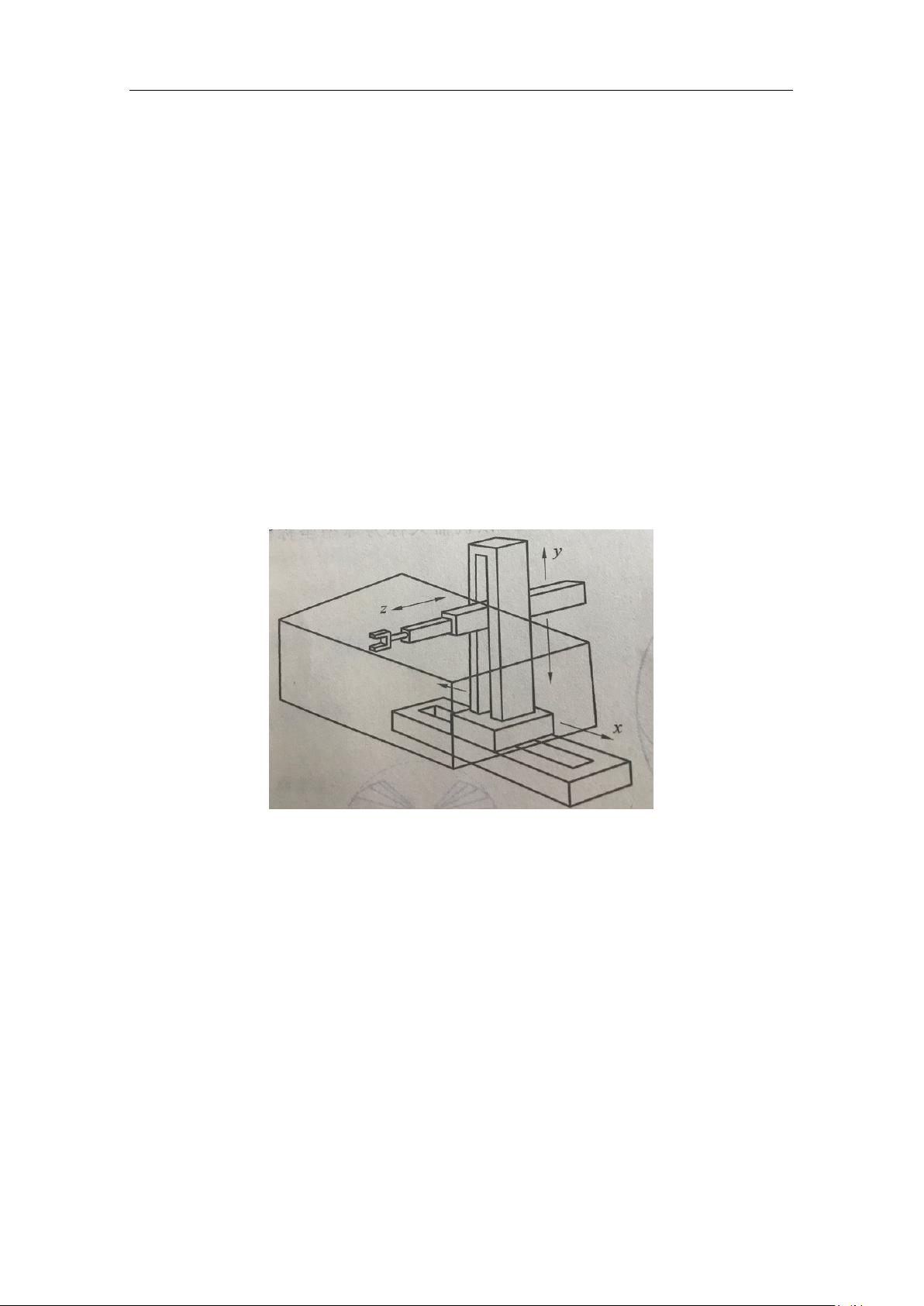
笛卡尔坐标:机械臂在由 x、y、z 组成的右手直角坐标内做直线运动,名为
笛卡尔坐标,如下图 2.1 所示。该类型需要预留大量的操作空间,刚性的结构给
末端位置提供了精确的位置,但是该类型维护起来较难,由于直线运动是采用旋
转电机配合上螺母和滚珠丝杠来实现的,因此堆积在螺杆中的灰尘会影响机械臂
的滑动,且其组件必须采用刚性高的材料,这类机械臂造价较高,考虑到成本关
系且占据空间大,工作范围小,故对此类型坐标不做考虑。
[7]
图 2.1 笛卡尔坐标机械臂
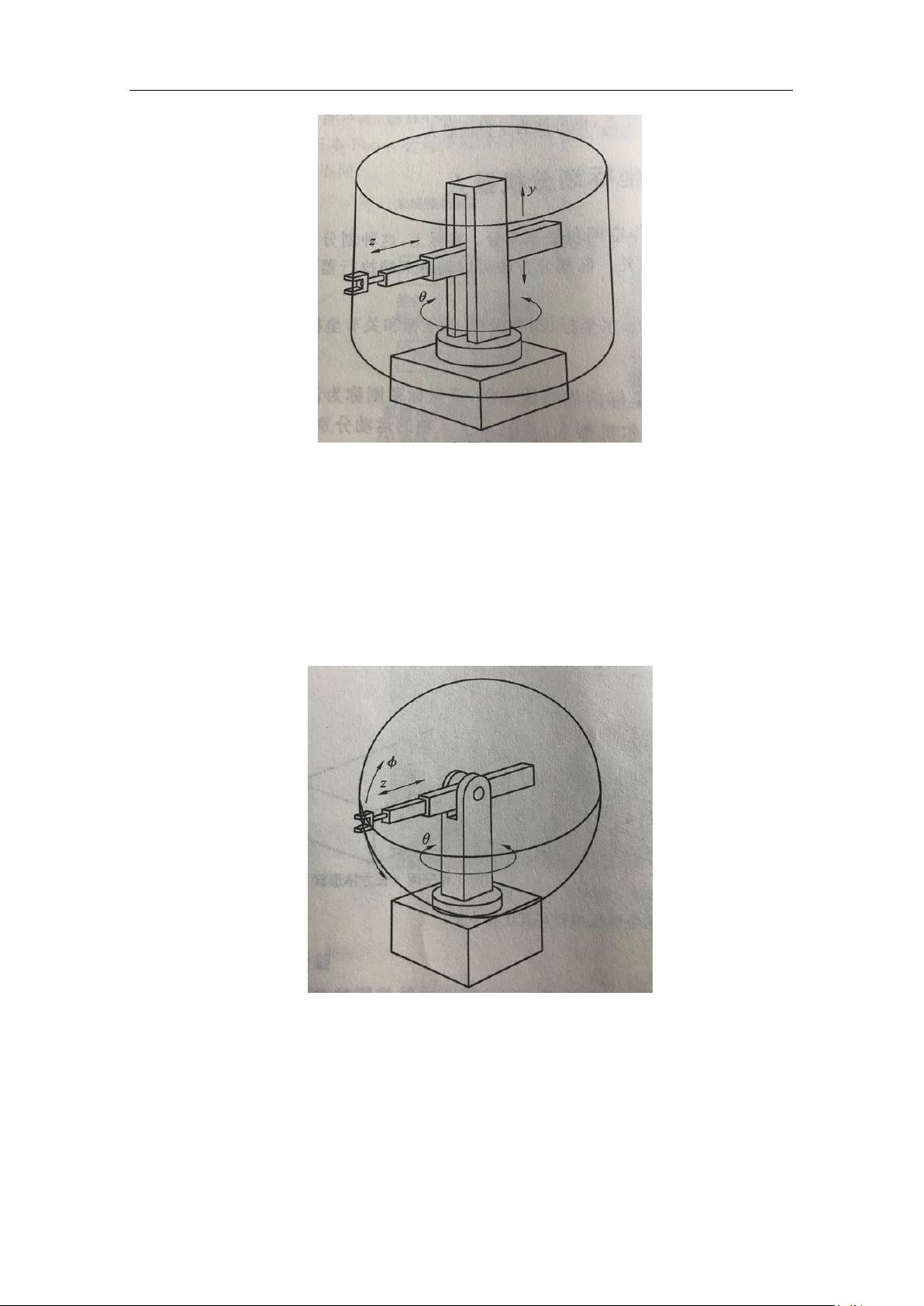
圆柱坐标:该类型机械臂采用了两个平移关节和一个旋转关节,运动坐标就
是圆柱坐标,如下图 2.2 所示。图中机械臂能够作出 z 轴方向的伸长与缩短运
动、y 轴方向的上下移动和腰关节的 360 度旋转运动。与直角坐标相比较,该工
作空间是一个圆柱体,与长方体空间相比较,空间要小一点,可以看到,如果所
要抓取的物体高度比机械臂底座要矮,则根本抓取不了,这在一定的程度上限制
了手臂的发挥空间,同时惯性也比较大。同样的,其直线驱动部分也难以实现防
尘。考虑到本设计要识别抓取地面上的工件,故不采用该坐标形式的机械臂。
剩余52页未读,继续阅读
2022-07-12 上传
2023-06-10 上传
2023-02-24 上传
2023-05-30 上传
2023-05-31 上传
2023-05-31 上传
2023-09-04 上传

南抖北快东卫
- 粉丝: 78
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
