过度参数化机器学习:理论与泛化能力
下载需积分: 0 | PDF格式 | 2.03MB |
更新于2023-04-28
| 135 浏览量 | 举报
“《过参数化机器学习理论》综述论文探讨了近年来机器学习领域的重大进展,特别是关于过参数化模型如何在实践中展现出优秀的泛化能力,这一现象挑战了传统的偏差-方差权衡理论,并揭示了双下降现象。”
本文主要关注的是机器学习中的一个核心议题:过参数化模型的泛化性能。过参数化指的是模型的复杂度远超训练数据的规模,理论上这样的模型会过度拟合训练数据,导致在新数据上的表现不佳。然而,实际情况却并非如此,许多过参数化的模型,包括线性模型和深度神经网络,即便在插值训练数据的情况下,也能在测试数据上表现出良好的泛化能力。
传统的机器学习理论基于偏差-方差权衡的概念,认为模型的复杂度应该适中,以平衡训练数据的拟合程度(偏差)和对噪声的敏感性(方差)。然而,过参数化模型的泛化能力打破了这一规则,引发了研究人员对这一经典理论的重新审视。文章中提到的“双下降现象”是一个关键发现,它表明随着模型复杂度的增加,模型的测试误差先降低后升高再降低,即在某一过度参数化阶段,模型的性能反而优于未过参数化的最佳模型。
为了理解这一现象,研究者需要发展新的理论框架。过参数化模型的学习机制可能涉及到如正则化、数据的内在结构、优化过程的性质以及模型的表示能力等多个方面。这些因素如何共同作用,使得模型能够在大量复杂度下避免过拟合并实现泛化,是当前理论研究的重要课题。
此外,论文可能还涵盖了训练算法的影响,如随机梯度下降(SGD)在处理过参数化模型时的特殊行为,以及如何通过调整学习率、批次大小等参数来优化模型的泛化性能。研究者可能还讨论了在实际应用中,如何有效地利用过参数化模型,同时防止过拟合的策略,如早停法、dropout和数据增强等。
《过参数化机器学习理论》综述论文旨在深入剖析过参数化模型背后的理论基础,揭示其泛化性能的秘密,这对于未来机器学习模型的设计和优化具有重要的指导意义。通过这样的研究,我们可以更好地理解和利用这些复杂的模型,推动机器学习技术的进一步发展。

where Σ
x
= C
d
Λ
x
C
T
d
and Λ
x
is a d × d real diagonal matrix. By Example 1, φ , U
T
p
x is the
p-dimensional feature vector where U
p
is a d ×p real matrix with orthonormal columns that extract
the features for the learning process. Consequently, φ ∼ N(0, Σ
φ
) where Σ
φ
= U
T
p
C
d
Λ
x
C
T
d
U
p
.
If the feature space for learning is based on DCT basis vectors (i.e., the columns of U
p
are the first p
columns of C
d
), then the p × p input feature covariance matrix Σ
φ
is diagonal; in fact, its diagonal
entries are exactly the first p entries of the diagonal of the d × d data covariance matrix Λ
x
.
2.2. The double descent phenomenon
Figure 2 studies the relationship between model complexity (in number of parameters) and test
error induced by linear regression with a linear feature map (in line with Example 1). For both
experiments, we set d = 128 and n = 32, and vary the number of parameters p to be between 1
and d. We also consider β to be an approximately 20-sparse parameter vector such that the majority
of its energy is contained in the first 20 discrete cosine transform (DCT) features (see Figure 2(b)
for an illustration). The input data covariance matrix Σ
x
is also considered to be anisotropic, as
pictured in the heatmap of its values in Figure 2(c).
We consider two choices of linear feature maps, i.e., two choices of orthonormal bases {u
j
}
d
j=1
:
the discrete cosine transform (DCT) basis and the Hadamard basis. In the first case of DCT features,
the model is well-specified for p = d and the bulk of the optimal model fit will involve the first 20
features as a consequence of the approximate sparsity of the true parameter β in the DCT basis (see
Figure 2(e)). As a consequence of this alignment, the feature covariance matrix, Σ
φ
, is diagonal
and its entries constitute the first p entries of the diagonalized form of the data covariance matrix,
denoted by Λ
x
. The ensuing spiked covariance structure is depicted in Figure 2(f). Figure 2(d)
plots the test error as a function of the number of parameters, p, in the model and shows a counter-
intuitive relationship. When p < n = 32, we obtain non-zero training error and observe the classic
bias-variance tradeoff. When p > n, we are able to perfectly interpolate the training data (with
the minimum `
2
-norm solution). Although interpolation of noise is traditionally associated with
overfitting, here we observe that the test error monotonically decays with the number of parameters
p! This is a manifestation of the double descent phenomenon in an elementary example inspired by
signal processing perspectives.
The second choice of the Hadamard basis also gives rise to a double descent behavior, but is
quite different both qualitatively and quantitatively. The feature space utilized for learning (the
Hadamard basis) is fundamentally mismatched to the feature space in which the original parameter
vector β is sparse (the DCT basis). Consequently, as seen in Figure 2(h), the energy of the true
parameter vector β is spread over the d Hadamard features in an unorganized manner. Moreover,
the covariance matrix of Hadamard features, depicted as a heat-map in Figure 2(i), is significantly
more correlated and dispersed in its structure. Figure 2(g) displays a stronger benefit of overparam-
eterization in this model owing to the increased model misspecification arising from the choice of
Hadamard feature map. Unlike in the well-specified case of DCT features, the overparameterized
regime significantly dominates the underparameterized regime in terms of test performance.
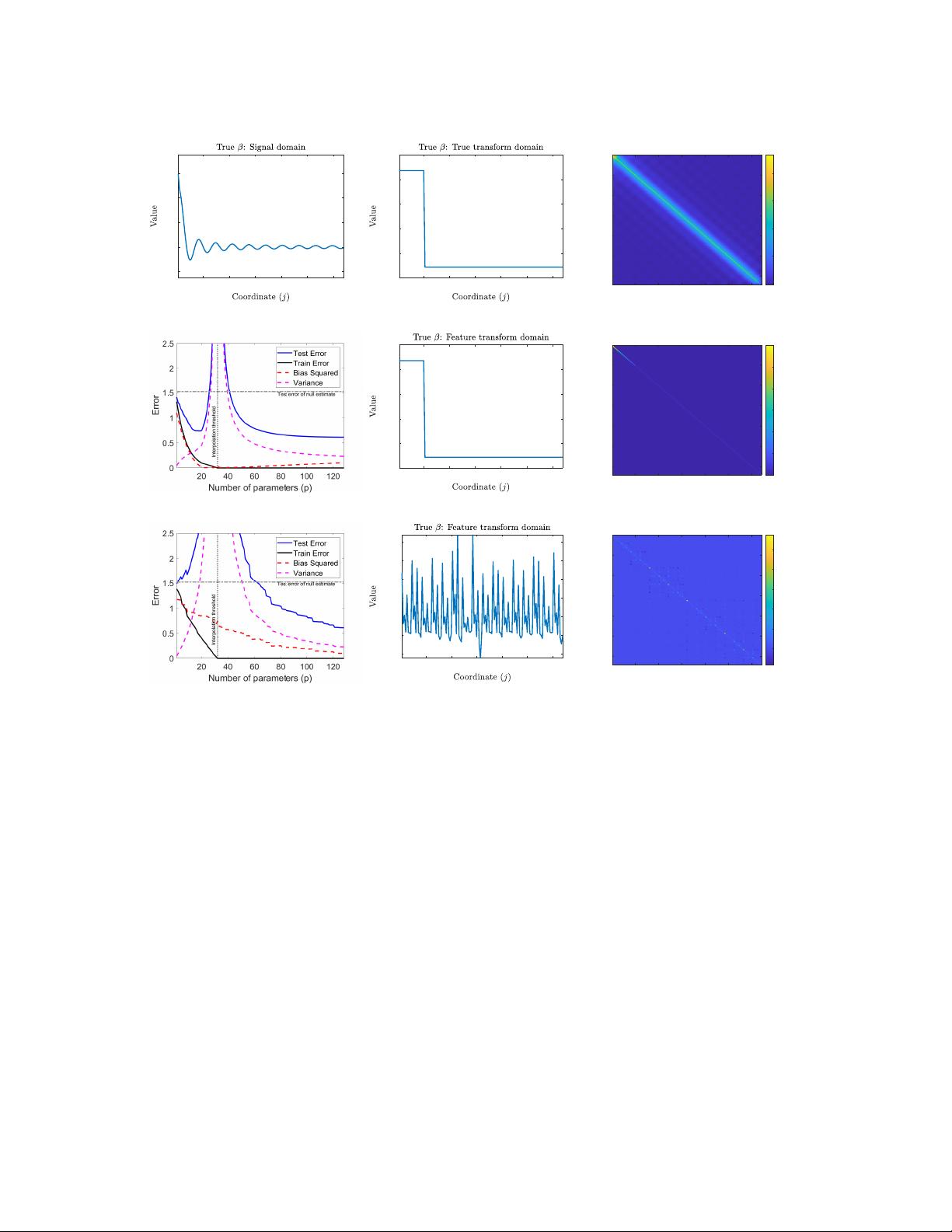
Finally, the results in Fig. 3 correspond to β that its components are shown in Fig. 3(a) and its
DCT-domain representation is presented in Fig. 3(b). The majority of β’s energy is in a mid-range
“feature band” that includes the 18 DCT features at coordinates j = 21, . . . , 38; in addition, there
are two more high-energy features in coordinates j = 1, 2, and the remaining coordinates are of low
energy (see Fig. 3(b)). The input covariance matrix Σ
x
, presented in Fig. 3(c), is the same as before
9
剩余47页未读,继续阅读
相关推荐




syp_net
- 粉丝: 158
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
