电机编码器测速原理与SLAMUGV配置教程
116 浏览量
更新于2024-08-31
收藏 163KB PDF 举报
"slamugv使用说明–5.电机编码测速"
本文主要介绍电机编码器测速及其在slamugv中的应用,重点讲述了编码器的基本原理、分类以及直流有刷电机的参数,并提供了Cube配置编码器测速的教程。
编码器是一种用于转换信号或数据的设备,它可以将机械的角位移或直线位移转化为电信号。根据工作原理,编码器分为增量式和绝对式两种类型。
1. 增量式编码器:这种编码器将位移转换为周期性的电信号,进而转变为计数脉冲。脉冲的数量代表位移的大小。增量式编码器通常有A、B、Z三相,A和B相之间的相位差为90度,可用于区分正反转。通过分析A、B相的上升沿和下降沿,可以实现2倍频和4倍频,以提高测量精度。Z相则提供单圈脉冲信息,但在某些低成本的直流有刷电机中可能不包含这一相。
2. 绝对式编码器:与增量式不同,绝对式编码器在每个位置都有一个唯一的二进制编码(格雷码),由多道刻线形成,提供从2的零次方到2的n-1次方的编码,确保了在任何位置都能精确获取当前位置信息。
接下来,我们讨论直流有刷电机的一些关键参数,例如减速比、空载电流、空载转速、额定扭矩、额定转速、额定电流、最大扭矩和停转电流等,这些参数对于电机性能和控制至关重要。
在slamugv中,使用Cube软件进行编码器测速的配置是一个重要步骤。首先,我们需要在Cube中设置好编码器接口对应的GPIO引脚和定时器。配置完成后,生成代码。编码器的触发方式(上升沿、下降沿或双边沿)可以在生成代码后进行调整。在配置定时器时,通过设置TIMx_SMCR寄存器的SMS字段来指定计数器的计数条件,如只在TI2边沿计数(SMS=001)、只在TI1边沿计数(SMS=010)或在TI1和TI2边沿都计数(SMS=011)。同时,TIMx_CCER寄存器控制着CC1和CC2的输入边沿检测。
通过这样的配置,slamugv能够准确地捕捉电机的旋转速度,这对于机器人定位、SLAM(Simultaneous Localization And Mapping,即同步定位与建图)等应用至关重要,因为它提供了电机运动的实时反馈,从而确保系统能够精确控制电机的运动状态。
slamugv使用说明使用说明–5.电机编码测速电机编码测速
电机编码器测速
编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号
编码器分类及原理:
按编码器原理分增量式和绝对式
增量式编码器:增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。
增量式编码器通常有A,B,Z三相,A,B相之间延迟1/4的周期(90度)的脉冲输出,根据延时的关系可以区别正反转。而且通过A,B相的上升沿和下降沿可以进行2倍频和4倍频,用
来提高精度,Z相为单圈脉冲,我们的直流有刷电机比较便宜,所以没带Z相,所以我就不解释了。想知道的可以自行了解
绝对式编码器:绝对编码器光码盘上有许多道刻线,每道刻线依次以2线、4线、8线、16线。。。。。。编排,这样,
在编码器的每一个位置,通过读取每道刻线的通、暗,获得一组从2的零次方到2的n-1次方的唯一的2进制编码(格雷码),这就称为n位绝对编码器。
直流有刷电机参数:
减速比30
空载电流<400ma
空载转速415rpm
额定扭矩3.9Kg.cm
额定转速350rpm
额定电流 <1.9A
最大扭矩30kg.cm
停转电流11.0A
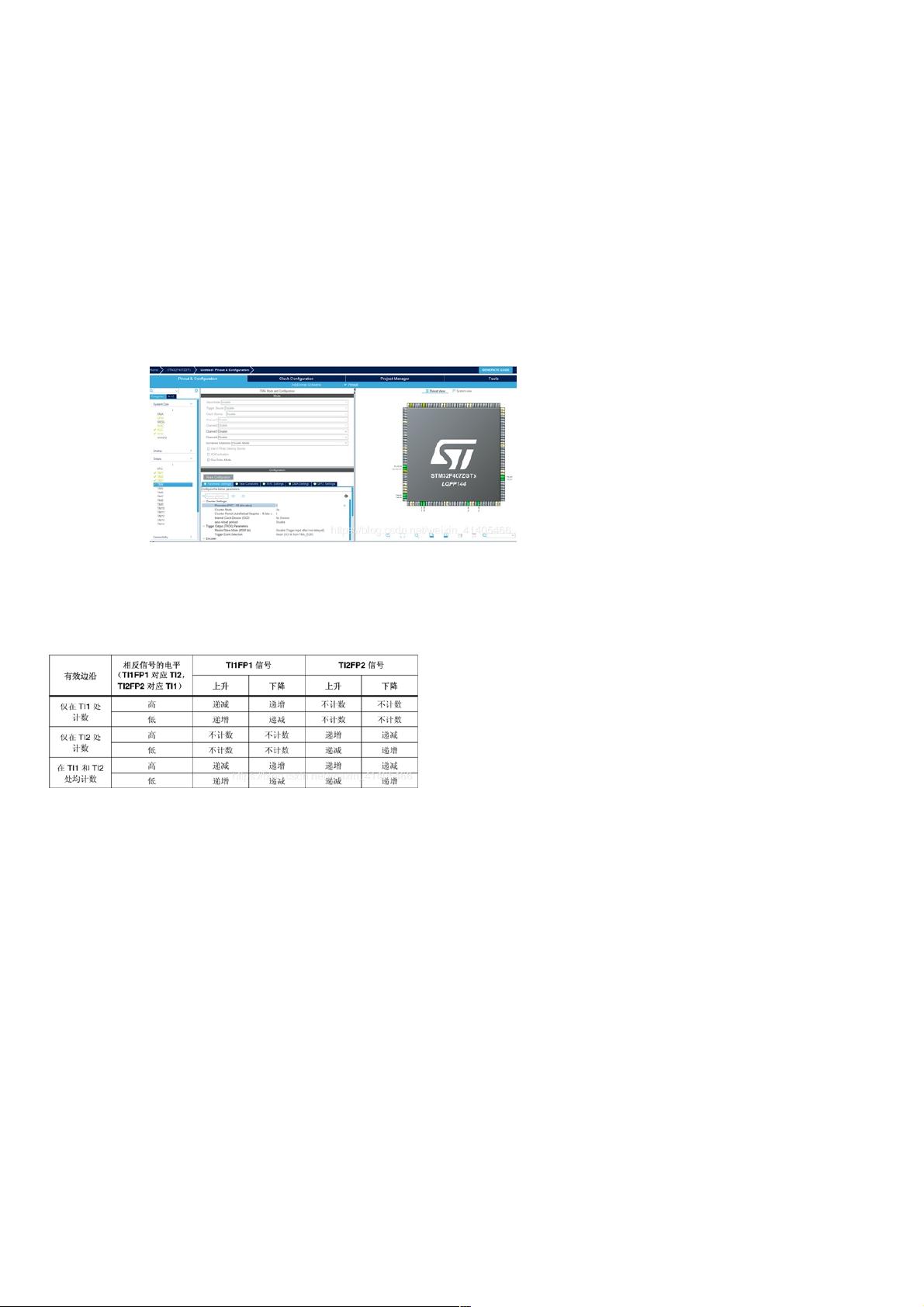
1.编码器测速cube配置教程
定时器有编码器模式直接配置
![在这里插入图片描述 (https://img-blog.csdnimg.cn/20200410221231830.png?x-oss-
process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3dlaXhpbl80MTQwNTQ2Ng==,size_16,color_FFFFFF,t_70)
我之前的定义都定义好了编码器接口对应的引脚和定时器,直接配置就行
然后生成代码
编码器是上升沿触发还是下降沿触发,还是双边沿触发,这个后面生成代码再改
寄存器讲解
选择编码器接口模式时,如果计数器仅在 TI2 边沿处计数,在 TIMx_SMCR 寄存器中写入SMS=001;如果计数器仅在 TI1 边沿处计数,写入 SMS=010;如果计数器在 TI1 和
TI2 边沿处均计数,则写入 SMS=011。通过编程 TIMx_CCER 寄存器的 CC1P 和 CC2P 位,选择 TI1 和 TI2 极性。如果需要,还可对输入滤波器进行编程。
编码器定时器计数的是cnt,debug可以看到,后面我会抽空做一篇关于mdk debug的小技巧
关键代码解读
伪代码:
1. 初始化编码器GPiO引脚
2. 初始化编码器定时器
3. 通过编码器触发中断计数
4. 通过读编码器定时器计算小车轮子的转速
```c
```c
/* 私有变量 ------------------------------------------------------------------*/
__IO uint16_t time_count=0; // 时间计数,每1ms增加一(与滴答定时器频率有关)
__IO int32_t CaptureNumber[4]={0}; // 输入捕获数
#define ENCODER 16 // 编码器线数
#define SPEEDRATIO 30 // 电机减速比
#define PPR (SPEEDRATIO*ENCODER*4) // Pulse/r 每圈可捕获的脉冲数
TIM_HandleTypeDef TIM1_Encoder;
TIM_HandleTypeDef TIM2_Encoder;
TIM_HandleTypeDef TIM3_Encoder;
TIM_HandleTypeDef TIM4_Encoder;
float Speed1 = 0;
float Speed2 = 0;
float Speed3 = 0;
float Speed4 = 0;
__IO int16_t OverflowCount[4] = {0};//定时器溢出次数
void Encoder_Tim1_Init(void)
{
TIM_Encoder_InitTypeDef EncoderConfig;
TIM_MasterConfigTypeDef sMasterConfig;
下载后可阅读完整内容,剩余5页未读,立即下载
539 浏览量
103 浏览量
140 浏览量
136 浏览量
792 浏览量
2022-09-22 上传

weixin_38576922
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Visual Studio 2008:十大革新特性,包括LINQ和代码段编辑器
- CMPP2.0短信网关接口开发详解:协议结构与消息定义
- InfoQ出品:免费在线《深入浅出Struts2》教程
- Windows服务器2003数字证书与PKI实战指南
- C++TEST中文文档:代码标准分析和单元测试报告
- JS表单验证技巧集:字符限制、字符类型检测
- 一键式解决Java桌面应用的部署难题
- Android程序设计大赛I:20佳获奖作品展示与创新应用解析
- Oracle DBA基础教程:从开机到管理全记录
- 《人件》:软件工程中的人的因素与团队生产力
- 全球移动通信系统GSM:原理与频段解析
- 《Linux内核0.11完全注释》:深入理解操作系统核心
- 浅析计算机键盘构造与PS/2接口原理详解
- SIMATIC S7-300编程手册:STL指令详解
- Visual Source Safe (VSS) 在软件开发中的应用
- Java命令参数详解:从基础到扩展
