ROS多机器人探索环境学习笔记:explore_lite详解
89 浏览量
更新于2023-05-03
4
收藏 521KB PDF 举报
"这篇博客文章主要探讨了ROS(机器人操作系统)中的多机器人探索环境,重点关注了一个名为explore_lite的软件包,该包采用贪婪前沿算法进行环境探索。文章还提到了涉及的关键ROS消息类型和节点,包括nav_msgs/OccupancyGrid、map_msgs/OccupancyGridUpdate以及move_base,并简要介绍了它们的功能。此外,多机器人地图合并(multirobot_map_merge)也被提及,作为多机器人环境中协同工作的一部分。"
在多机器人探索环境(multirobot exploration)中,explore_lite包是一个高效且易于配置的解决方案。它基于贪婪前沿策略,意味着每个机器人会尽可能地扩大其已知区域,直至整个环境被完全探索。这个包不创建自己的代价地图(costmap),而是直接订阅nav_msgs/OccupancyGrid消息,利用这些消息来理解环境并规划机器人的路径。同时,explore_lite节点还能处理非膨胀地图,进行边界滤波,并具备目标黑名单功能,以便处理机器人无法到达的区域。
nav_msgs/OccupancyGrid是一种在ROS中表示2D网格地图的标准消息类型。它包含地图的分辨率、原点位置以及一个二维数组,用于存储每个地图细胞的占用概率。这种消息对于构建和更新机器人环境模型至关重要。
map_msgs/OccupancyGridUpdate消息则用于传递地图的局部更新,允许在不替换整个地图的情况下修改地图数据。这对于实时地图更新和多机器人协作探索非常有用,因为机器人可以在探索过程中不断向中央地图发送新的观测信息。
move_base是ROS中的一个核心导航节点,它结合了路径规划、避障和控制等模块,为机器人提供自主导航能力。在这个多机器人环境中,move_base负责接收explore_lite发出的运动指令,并将这些指令转化为实际的机器人运动。
多机器人地图合并(multirobot_map_merge)是多机器人系统中的另一个关键组件,它能够整合不同机器人收集的地图信息,创建一个全局一致的地图视图。这对于协作探索和构建大规模环境的全局模型非常重要。
这篇学习笔记详细介绍了ROS中多机器人环境探索的基本原理和技术,包括地图构建、导航和协作,为读者提供了深入理解ROS环境下多机器人探索的基础。通过学习这些概念和工具,开发者可以进一步构建自己的多机器人探索系统。
ROS学习笔记之学习笔记之——多机器人探索环境多机器人探索环境
本博文是基于这个ROS软件包(https://github.com/hrnr/m-explore)的学习笔记
目录目录
multi robot exploration
nav_msgs/OccupancyGrid
map_msgs/OccupancyGridUpdate
move_base
multirobot_map_merge
参考资料
multi robot exploration
这个包名为explore_lite,采用greedy frontier-based exploration。当节点运行时,机器人会贪婪地探索环境,直到找不到边界为止。就是这些机器人会一直把整个区域都探索完。如
下图所示
explore_lite不会创建自己的costmap,这使得配置更容易,效率更高(资源更少)。节点简单的订阅nav_msgs/OccupancyGrid 这个消息,机器人运动的命令也直接传到move_base
Node can do frontier filtering (边界滤波) and can operate even on non-inflated maps(非膨胀地图). Goal blacklisting (黑名单) allows to deal with places inaccessible (无法
到达的地方) for robot.
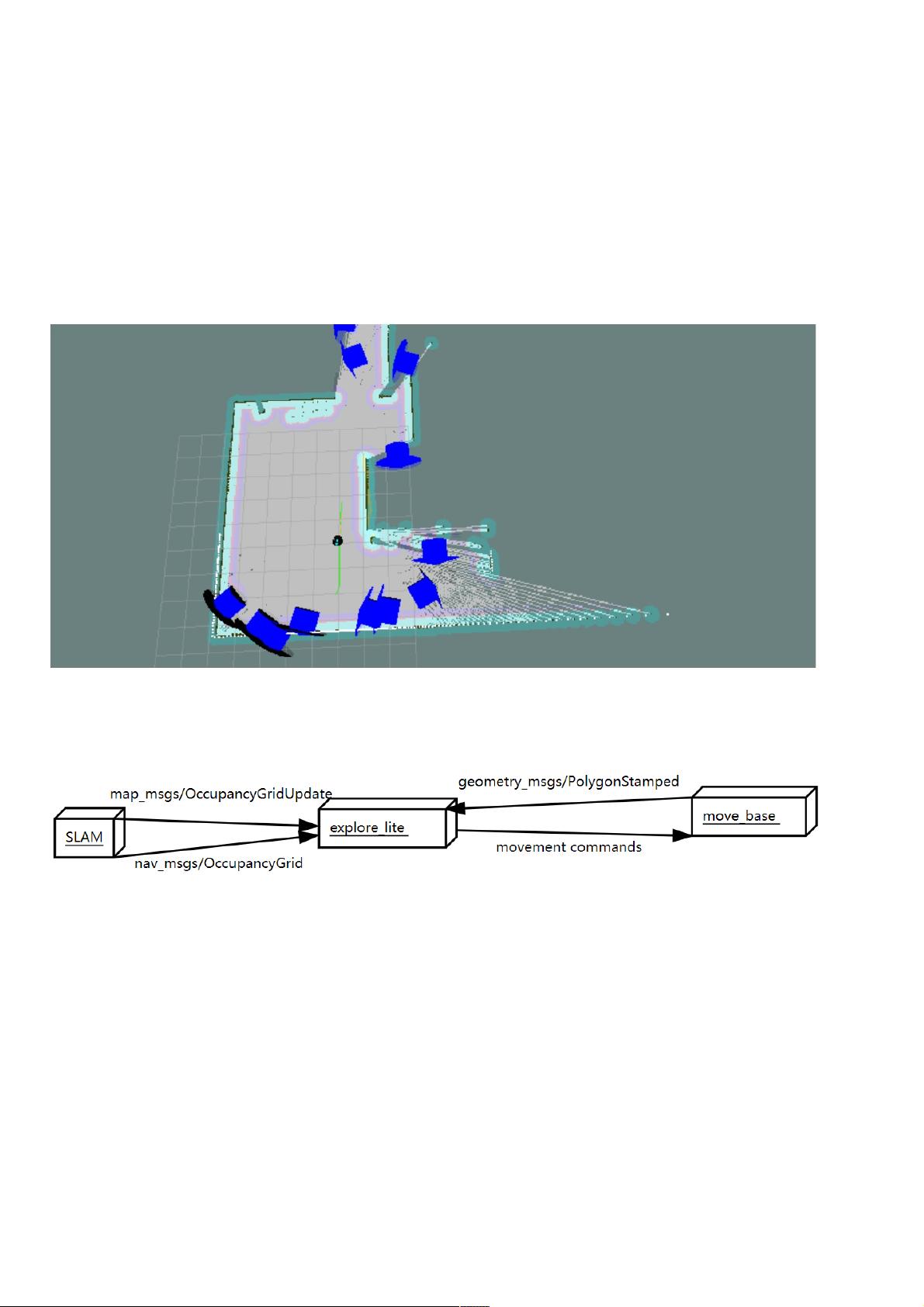
下面介绍一下这个功能包的结构。如下图所示。explore_lite采用move_base节点来导航
explore_lite通过订阅nav_msgs/OccupancyGrid和map_msgs/OccupancyGridUpdate的消息来构建地图,确认地图的边界。可以使用由move_base产生的
costmap(/global_costmap/costmap)或者由SLAM构建的地图。
nav_msgs/OccupancyGrid
http://docs.ros.org/api/nav_msgs/html/msg/OccupancyGrid.html
下载后可阅读完整内容,剩余3页未读,立即下载
2021-05-14 上传
2021-01-06 上传
2021-01-07 上传
2021-01-07 上传
2021-01-06 上传
2021-01-27 上传

weixin_38645862
- 粉丝: 9
- 资源: 902
 我的内容管理
展开
我的内容管理
展开







最新资源
- NotATokenLogger
- capture_react
- ac:YML放置区
- 学生成绩管理系统.rar
- 【Java毕业设计】Java 网上商城系统-毕业设计.zip
- 电子功用-按键识别方法、键盘和电子设备
- AT91SAM7X256开发板(工程文件+程序),可直接制板加工-电路方案
- kbd_check:键盘检查器
- python实例-13 截图工具.zip源码python项目实例源码打包下载
- DA_project-
- Bot-S-ries-SITE-TOP-FLIX:阿尔法玛意甲上的Bot para passar osepisódios现场,Top Flix,testei unicamente nasérie宣言。
- django_sso:Django框架实现OAuth2
- 【Java毕业设计】c++,毕业设计,因为网络专业不能写java。冥思苦想了这么个玩意儿,本来想借此机会学习http.zip
- 电子功用-可充电锂硫电池的正极活性物质及其制备方法
- PackCC:用于C的packrat解析器生成器-开源
- 卡片式插入列表(iPhone源代码)
