
基于基于Labview的同步伺服系统的同步伺服系统PID模糊控制器设计模糊控制器设计
1.引言 颤振试飞是直接影响飞行安全关键课题之一,而在颤振试飞实验中,颤振激励系统是颤振试飞的重
要设备之一。 本文以LabVIEW 7软件为开发平台,运用LabVIEW 强大的数据采集功能及其PID和Fuzzy
logic两个工具箱为该伺服系统设计一个基于虚拟仪器的控制器,涉及到同步控制、小型特种永磁无刷直流伺服
电机技术等一系列问题完成双电机的同步控制。 2 基于虚拟仪器同步伺服系统控制器的设计 2.1 同步
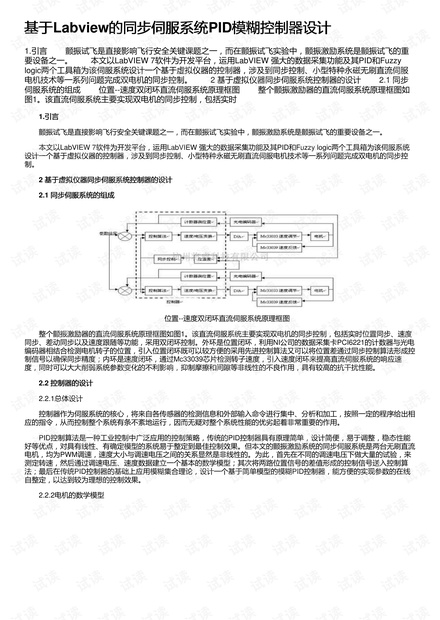
伺服系统的组成 位置--速度双闭环直流伺服系统原理框图 整个颤振激励器的直流伺服系统原理框图如
图1。该直流伺服系统主要实现双电机的同步控制,包括实时
1.引言引言
颤振试飞是直接影响飞行安全关键课题之一,而在颤振试飞实验中,颤振激励系统是颤振试飞的重要设备之一。
本文以LabVIEW 7软件为开发平台,运用LabVIEW 强大的数据采集功能及其PID和Fuzzy logic两个工具箱为该伺服系统
设计一个基于虚拟仪器的控制器,涉及到同步控制、小型特种永磁无刷直流伺服电机技术等一系列问题完成双电机的同步控
制。
2 基于虚拟仪器同步伺服系统控制器的设计基于虚拟仪器同步伺服系统控制器的设计
2.1 同步伺服系统的组成同步伺服系统的组成
位置--速度双闭环直流伺服系统原理框图
整个颤振激励器的直流伺服系统原理框图如图1。该直流伺服系统主要实现双电机的同步控制,包括实时位置同步、速度
同步、差动同步以及速度跟随等功能,采用双闭环控制。外环是位置闭环,利用NI公司的数据采集卡PCI6221的计数器与光电
编码器相结合检测电机转子的位置,引入位置闭环既可以较方便的采用先进控制算法又可以将位置差通过同步控制算法形成控
制信号以确保同步精度;内环是速度闭环,通过Mc33039芯片检测转子速度,引入速度闭环来提高直流伺服系统的响应速
度,同时可以大大削弱系统参数变化的不利影响,抑制摩擦和间隙等非线性的不良作用,具有较高的抗干扰性能。
2.2 控制器的设计控制器的设计
2.2.1总体设计
控制器作为伺服系统的核心,将来自各传感器的检测信息和外部输入命令进行集中、分析和加工,按照一定的程序给出相
应的指令,从而控制整个系统有条不紊地运行,因而无疑对整个系统性能的优劣起着非常重要的作用。
PID控制算法是一种工业控制中广泛应用的控制策略,传统的PID控制器具有原理简单,设计简便,易于调整,稳态性能
好等优点,对具有线性、有确定模型的系统易于整定到最佳控制效果。但本文的颤振激励系统的同步伺服系统是两台无刷直流
电机,均为PWM调速,速度大小与调速电压之间的关系显然是非线性的。为此,首先在不同的调速电压下做大量的试验,来
测定转速,然后通过调速电压、速度数据建立一个基本的数学模型;其次将两路位置信号的差值形成的控制信号送入控制算
法;最后在传统PID控制器的基础上应用模糊集合理论,设计一个基于简单模型的模糊PID控制器,能方便的实现参数的在线
自整定,以达到较为理想的控制效果。
2.2.2电机的数学模型

weixin_38623080
- 粉丝: 5
- 资源: 1003
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- RTL8188FU-Linux-v5.7.4.2-36687.20200602.tar(20765).gz
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0