PX4 L1自适应控制算法解析与APM实现
下载需积分: 49 | PDF格式 | 1.28MB |
更新于2023-05-11
| 187 浏览量 | 举报
"px4-L1自适应控制算法.pdf"
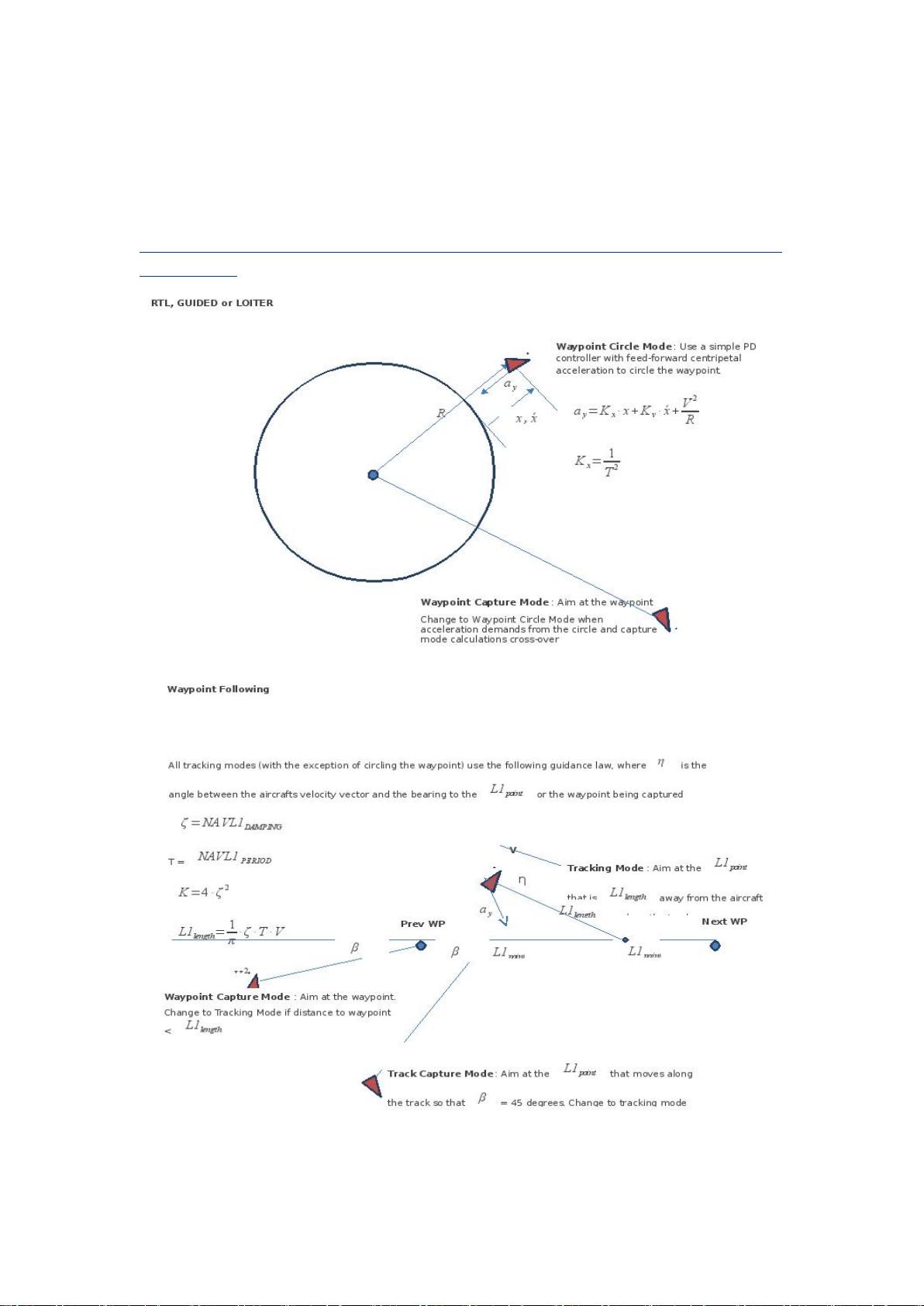
L1自适应控制算法是一种在无人机导航和轨迹跟踪中广泛采用的先进控制策略,尤其在固定翼无人机中表现出优秀的性能。该算法的设计理念是通过结合传统的PD控制和L1滤波器的优点,实现对飞行器的高效、稳定且精确的控制。
1. L1自适应控制的基本原理
L1自适应控制算法的核心思想是利用L1范数来设计控制器,这使得系统具有快速的收敛速度和良好的鲁棒性。在无人机的运动控制中,L1算法能够迅速响应外部扰动,同时保持良好的跟踪性能。
2. 与PD控制的关系
L1控制可以视为PD控制的一种改进版本。在L1控制系统中,横向加速度的计算涉及到了L1控制周期(T)、角频率(ω)以及一系列参数(K_x, K_v, ζω),这些参数影响着系统的动态响应。方程(6)和(7)展示了L1控制如何与PD控制相结合,分别用于x轴和y轴的加速度控制,以实现更平滑的飞行轨迹跟踪。
3. 更新逻辑代码解析
在APM(ArduPilot)的实现中,`update_loiter`和`update_waypoint`两个函数扮演了关键角色。在`update_loiter`中,由于圆弧路径的控制较为复杂,代码采用了PD控制来处理这部分,而直线路径跟踪则由L1算法负责,体现了L1控制在直线跟踪上的优势。在`update_waypoint`中,L1算法被用来确保飞行器准确地沿着预设的直线路径行驶。
4. 参数调优
要充分利用L1自适应控制的优势,必须对相关参数进行适当的调优。这些参数包括但不限于控制周期T、比例增益K、阻尼比ζ以及系统自然频率ω。调优过程通常涉及到复杂的飞行测试和数值模拟,以找到最佳的参数组合,实现最优的飞行性能。
5. 实际应用与优化
APM无人机平台通过集成L1自适应控制算法,提高了飞行精度和稳定性,使得无人机在执行任务时能更好地遵循预设路线,尤其是在环境复杂、风速变化大的情况下。然而,实际应用中还需要考虑到无人机的硬件限制、传感器精度以及通信延迟等因素,对算法进行适当的调整和优化。
L1自适应控制算法在无人机导航中的应用极大地提升了飞行控制的性能,通过结合PD控制的简单性和L1滤波器的快速响应特性,实现了高效且精确的轨迹跟踪。理解和掌握这一算法对于无人机开发者和飞行控制系统设计师来说至关重要。
下载后可阅读完整内容,剩余5页未读,立即下载
相关推荐

j1124427436
- 粉丝: 14
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易二维码签到系统:会议活动签到解决方案
- Ceres库与SDK集成指南:C++环境配置及测试程序
- 深入理解Servlet与JSP技术应用与源码分析
- 初学者指南:掌握VC摄像头抓图源代码实现
- Java实现头像剪裁与上传的camera.swf组件
- FileTime 2013汉化版:单文件修改文件时间的利器
- 波斯语话语项目:实现discourse-persian配置指南
- MP4视频文件数据恢复工具介绍
- 微信与支付宝支付功能封装工具类介绍
- 深入浅出HOOK编程技术与应用
- Jettison 1.0.1源码与Jar包免费下载
- JavaCSV.jar: 解析CSV文档的Java必备工具
- Django音乐网站项目开发指南
- 功能全面的FTP客户端软件FlashFXP_3.6.0.1240_SC发布
- 利用卷积神经网络在Torch 7中实现声学事件检测研究
- 精选网站设计公司官网模板推荐
