FANUC机器人程序自动启动介绍.pdf
需积分: 50 52 浏览量
更新于2023-05-15
2
收藏 2.98MB PDF 举报
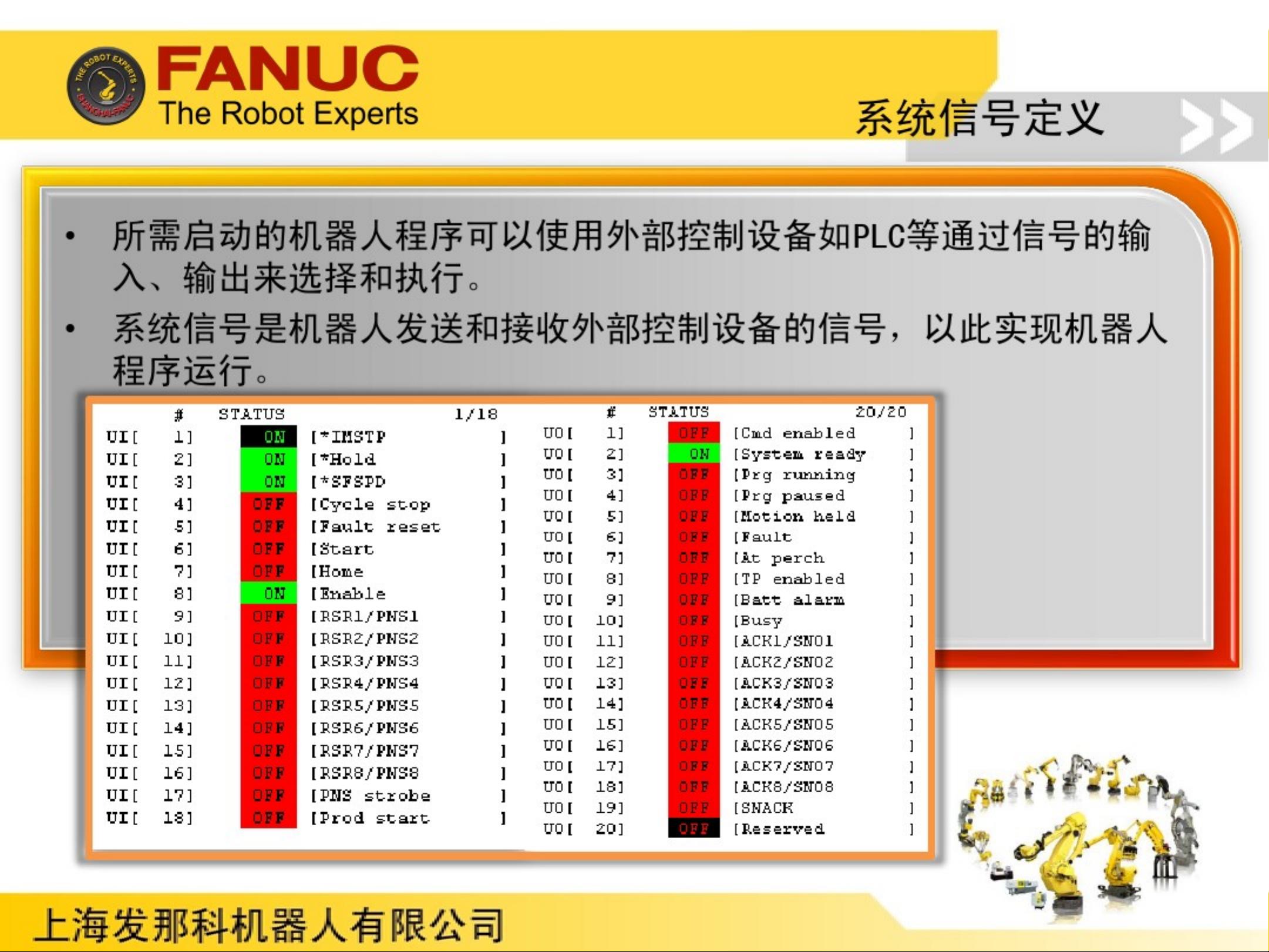
发那科机器人自动启动条件的说明,时序介绍,如何通过外部IO选择机器人运行的程序等,机器人启动的方式的设置与比较。


2021-01-23 上传
2022-03-29 上传
2021-09-11 上传
2021-09-27 上传
2022-07-01 上传
2022-07-10 上传
2022-05-27 上传
2021-04-03 上传

Kenwood'DOC
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- TwitchAdBlock:在twitch.tv上阻止流式嵌入式广告
- 3x5-led-display:用于生日“卡”的非常简单的arduino代码,其中包括3x5的led阵列,它们会闪烁“生日快乐”
- cr6community.github.io:CR-6社区网站和知识库
- goodgame-empire-api
- gatsby-wp:用于 WordPress 的 GatsbyJS 样板
- Three.JS-Webpack-Boilerplate-v4:设置用于开发与Webpack一起运行的Three.JS站点的环境
- react-test-jest-enzyme:通过React,Redux,Hooks和上下文代码以及测试驱动开发提高技能
- 参考资料-基于51单片机的泵控马达恒速控制.zip
- durga:分布式p2p对象数据库
- SingleClick Cleaner-crx插件
- boom:整理网页并提高可读性
- 基于java的开发源码-mina高性能Java网络框架.zip
- pytorch-resnet-mnist:https
- ride-my-way:拼车应用程序,使驾驶员能够创建乘车要约,乘客可以加入可用的乘车要约
- MS4-handlettering-art-full-stack-website:https:ms4-lettering-design-e-shop.herokuapp.com
- Pytorch-LSGAN-MNIST:LSGAN的Pytorch实现用于生成MNIST图像
