机器视觉驱动的汽车智能驾驶系统探索
24 浏览量
更新于2023-05-15
收藏 253KB PDF 举报
"基于机器视觉的汽车智能驾驶系统探讨了将这一先进的技术应用于车辆自主行驶中的可能性。机器视觉作为主要的路况感知手段,其核心价值在于它能够模拟人类驾驶员的视觉功能,提供高达90%的驾驶所需信息。相比于传统的雷达、红外测距仪和图像传感器,视觉传感器能获取更丰富、精确的环境信息,包括道路结构、障碍物的位置和动态,这对于复杂道路条件下的驾驶决策至关重要。
文章指出,尽管各国如德国、美国和日本在自动驾驶领域取得了显著进展,例如国防科技大学的无人驾驶红旗CA7460项目展示了高速行驶的能力,但它们的系统受限于传感器技术,主要适用于路况良好且相对简单的高速公路。然而,机器视觉的引入使得系统能够在更广泛环境中应用,包括路况不佳的城市和低级公路,这对于提高行车安全性、减轻驾驶员压力具有重要意义。
研究者们如Klaus Fleischer、D.Brzakowie和O.Djekoune等人分别在城市公路基础设施固定物体检测、道路边缘检测以及基于神经网络的视觉引导机器人导航等领域取得了突破,这些成果为机器视觉在汽车智能驾驶中的实际应用提供了理论支持和实践经验。
总结来说,机器视觉在汽车智能驾驶系统中的作用在于提供全面的道路环境理解,包括实时的路况分析、障碍物识别和距离测量。通过整合三维测量和图像识别技术,未来的自动驾驶系统有望实现更精准、更安全的驾驶控制,从而推动汽车行业的智能化进程,改善驾驶体验并降低事故风险。"
基于机器视觉的汽车智能驾驶系统基于机器视觉的汽车智能驾驶系统
本文把机器视觉技术为主要的路况感知手段应用到车辆自动驾驶中去,为实现车辆智能化驾驶提供一个不同的
思考角度。
1、引言
随着社会的发展和人口的增长,汽车越来越多的进入我们的日常生活,交通也日益拥挤。驾驶汽车是一项复杂的活动,长时间
的驾驶很容易使人感到疲劳,从而容易导致交通事故。此外一些工程车辆在作业时环境恶劣、劳动强度大,这些车辆的驾驶自
动化是非常有必要的。为了使汽车驾驶操作简单、安全、舒适,把人从繁重枯燥的汽车驾驶中解脱出来,当今世界各国都在积
极研究开发自动驾驶技术。
德国、美国和日本等国在汽车自动驾驶领域开展了积极的研究并取得了很大的成绩。我国国防科技大学机电工程学院一直在进
行汽车自动驾驶技术的研究,其与第一汽车集团公司联合研制的无人驾驶型“红旗”CA7460于2003年6月在湖南长沙试车成
功,稳定行驶时速达130KM/h(美国最高水平 100KM/h、德国120 KM/h),最高时速达170 KM/h,具备安全超车能力。但他
们的系统主要是依靠车载雷达、红外测距仪和图像传感器来识别测量路面环境状况,所得到的路面环境信息不丰富,不能满足
汽车智能驾驶的要求,所以这些系统都还只能在路况良好的高速公路上应用,无法适应道路环境恶劣的低级公路和城市公路。
视觉是人类观察世界、认识世界的重要功能手段,人类从外界获得的信息约有75%来自视觉系统,特别是驾驶员驾驶需要的信
息90%来自视觉。在目前汽车辅助驾驶所采用的环境感知手段中,视觉传感器比超声、激光雷达等可获得更高、更精确、更丰
富的道路结构环境信息。随着计算机技术的发展和图像处理/识别技术的成熟,机器视觉技术获得长足的发展,目前广泛的应
用在三维测量、三维重建、虚拟现实、运动目标检测和目标识别等方面。在汽车的自动驾驶发面,一个前提性的问题就是路况
识别和车辆、障碍物的距离、速度检测,解决了这个问题才可能去控制汽车的驾驶。而机器视觉技术融合三维测量和图像识别
技术于一身。
目前,机器视觉在智能机器人领域的研究热火朝天:Klaus Fleischer等人提出的基于机器视觉的城外公路基础设施固定对象的
检测与跟踪;D. Brzakovie等人提出道路边缘检测在移动机器人导航中应用 ; O.Djekoune等人提出基于神经网络的视觉引导机
器人导航。这些研究成果对机器视觉在智能驾驶中应用有着重要的启迪。
本文把机器视觉技术为主要的路况感知手段应用到车辆自动驾驶中去,为实现车辆智能化驾驶提供一个不同的思考角度。
2、机器视觉技术
自从MARR视觉计算理论提出以来,机器视觉技术迅速发展,是目前智能驾驶领域发展最快的技术之一,也是智能驾驶领域研
究的主要方向之一。
2.1机器视觉基本原理
获取场景中各点相对于摄像机的距离是立体视觉系统的重要任务之一,场景中各点相对于摄像机的距离可以用深度图(depth
map)来表示。机器视觉系统主要是依靠双(多)目CCD在不同的空间位置上上获取两(多)幅图像,通过这两(多)幅图
像的深度信息和成像几何来生成深度图(图1所示)。
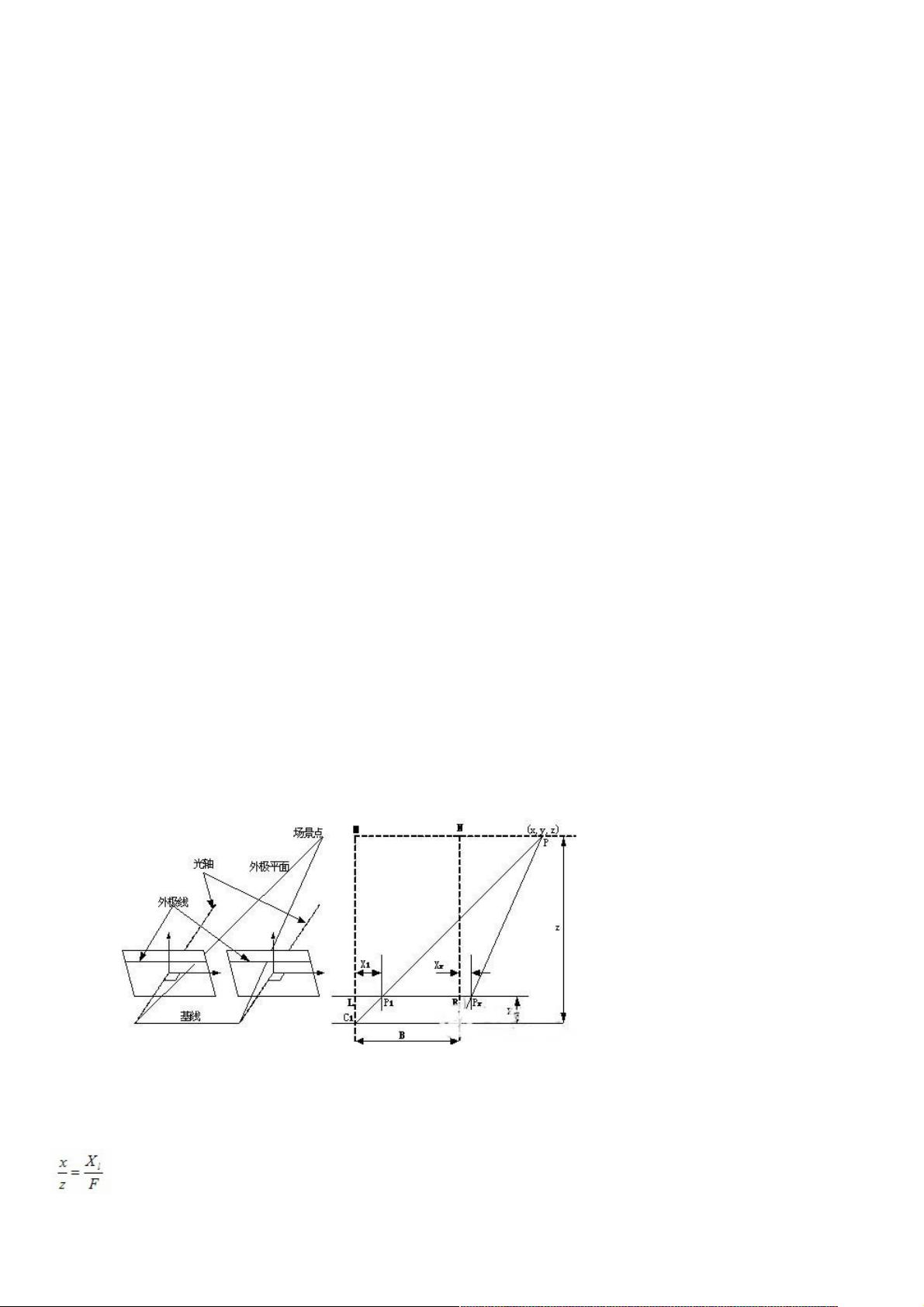
本文以比较简单常用的双目CCD视觉系统为例,它的几何关系如图所示。它由两个完全相同的CCD摄像机(摄像头)构成,
两个图像平面位于同一个平面上,两个摄像机(摄像头)的坐标轴相互平行,且x轴重合,摄像机之间在下x方向上的间距为极
限距离B。
图1 双目立体视觉几何模型
在图中,场景点P在左右图像平面中的投影点分别为P左和P右,假设坐标系原点与左透镜中心重合,比较相似三角形PMCl和
PlLCl得到:
(1)
同理,从相似三角形PNCr和PlRCr,得到:
下载后可阅读完整内容,剩余2页未读,立即下载
2014-06-30 上传
2022-11-24 上传
2022-11-24 上传
2021-09-07 上传
2021-09-20 上传
2024-01-20 上传

weixin_38672962
- 粉丝: 4
- 资源: 934
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
