UR机器人编程指南:从基础到高级
需积分: 13 126 浏览量
更新于2023-05-18
1
收藏 1.17MB PDF 举报
“UR编程一天通.pdf”文档主要涵盖了UR机器人的初步认识、编程操作以及高级编程的相关知识,特别强调了控制器、工具设置、与外部设备的互动等方面。
### 1. UR机器人的初步认识
#### 1.1 控制器的认识
UR机器人控制器是自动化系统中的关键组成部分,它负责控制机器人的运动和与外部设备的交互。控制器通常需要与PLC(可编程逻辑控制器)、视觉系统、数控机床等设备连接,以实现复杂的自动化任务。
#### 1.2 工具的设置
工具设置包括以下几个步骤:
1. **基础设置**:了解工具的基本属性,如尺寸、形状等。
2. **中心点坐标**:在示教器中设置TCP(工具中心点)在法兰坐标系的位置,通常是工具法兰到TCP的距离。
3. **重量设置**:使用外部设备测量工具的重量,并在控制器中输入,确保机器人能够正确处理有效负载。
4. **重心设置**:测量并输入工具的重心位置,以便机器人可以稳定地移动工具。
5. **TCP坐标**:对于非对称工具,需要设置TCP的具体坐标,并可能调整Z轴方向以匹配机器人的坐标系。
### 2. UR机器人的编程操作
#### 2.1 特征 - 坐标系
理解不同坐标系的概念,如基坐标系、工具坐标系、关节坐标系等,是编程的基础。在UR机器人中,用户可以灵活地使用这些坐标系来定义任务路径。
#### 2.2 包装应用
UR机器人支持各种包装应用,比如抓取、放置、装配等,这需要熟练运用编程技巧来实现复杂的运动轨迹和操作逻辑。
### 3. 机器人的高级编程
#### 3.1 高级指令 - ifelse命令
`ifelse`是条件判断语句,用于根据特定条件执行不同的代码块,是编写逻辑控制的关键。
#### 3.2 高级指令 - 赋值(计数器会用到)
在编程中,赋值指令用于改变变量的值,计数器则常用于跟踪循环次数或实现递增/递减操作。
#### 3.3 高级指令 - TCP的高级设定
高级TCP设置允许用户自定义TCP的行为,如动态改变TCP位置或调整TCP速度。
#### 3.4 高级指令 - 事件与线程
事件处理和线程管理允许机器人响应特定事件(如传感器信号),同时执行多个任务,提高效率。
#### 3.5 高级指令 - 开关
开关指令用于控制外部设备的开闭状态,如启动或停止一个机械臂的动作。
#### 3.6 变量和赋值指令
变量存储数据,赋值指令改变变量的值,它们在编程中用于数据处理和控制流程。
### 总结
“UR编程一天通.pdf”文档旨在帮助读者快速掌握UR机器人的基本操作和高级编程技术,通过学习,用户将能够有效地设置和控制UR机器人,实现与外部设备的互动,从而在自动化生产环境中发挥其潜力。
南京工业大学
4
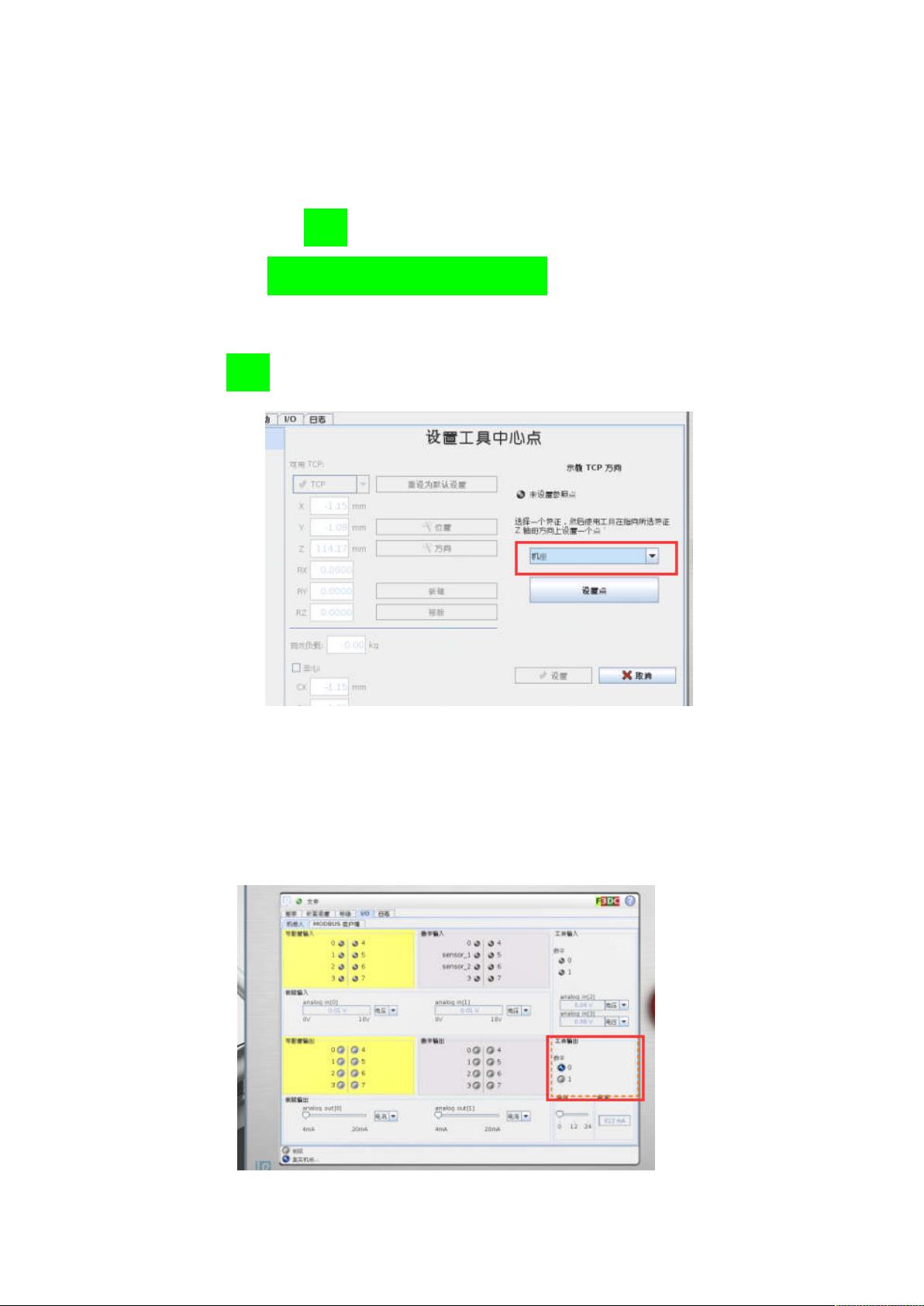
⑤ 设置类似于焊枪之类的工具的 TCP 的坐标
设置此类工具的坐标的时候,可以直接通过图三面板的位置复选
框进行设置。点击位置复选框,然后调整机器人的位姿达到同一个点。
设置四个点,此四个点位置相同、姿态不同。并且第四点是垂直于该
点的。另外,有些工具的形状可能不是轴对称的图形。我们可以对图
三面板的方向复选款进行设置。在新的窗口里面,选择机座。
图 9
调整工具的 Z 坐标轴平行于机座的 Z 轴。
1.3 与外部设备的互动
设置机器人与外部设备,例如夹爪、传送带的传感器设备进行 IO 的
连接。
剩余22页未读,继续阅读
2020-02-22 上传
2019-07-08 上传
2023-11-22 上传
2023-06-10 上传
2023-05-01 上传
2023-04-08 上传
2023-06-07 上传
2023-06-02 上传

谷神星在北
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- CoreOS部署神器:configdrive_creator脚本详解
- 探索CCR-Studio.github.io: JavaScript的前沿实践平台
- RapidMatter:Web企业架构设计即服务应用平台
- 电影数据整合:ETL过程与数据库加载实现
- R语言文本分析工作坊资源库详细介绍
- QML小程序实现风车旋转动画教程
- Magento小部件字段验证扩展功能实现
- Flutter入门项目:my_stock应用程序开发指南
- React项目引导:快速构建、测试与部署
- 利用物联网智能技术提升设备安全
- 软件工程师校招笔试题-编程面试大学完整学习计划
- Node.js跨平台JavaScript运行时环境介绍
- 使用护照js和Google Outh的身份验证器教程
- PHP基础教程:掌握PHP编程语言
- Wheel:Vim/Neovim高效缓冲区管理与导航插件
- 在英特尔NUC5i5RYK上安装并优化Kodi运行环境
