
DIFFERENTIAL GEOMETRY OF CURVES AND SURFACES
1. Curves in the Plane
1.1. Points, Vec tors, and Their Coordinates. Points and vectors are fundamental
objects in Geometry. The notion of point is intuitive and clear to everyone. The notion
of vector is a bit more delicate. In fa ct, rather than saying what a vector is, we prefer
to say what a vector has , namely: direction, sense, and length (or magnitude). It can be
represented by an arrow, and the main idea is that two arrows represent the same vector if
they have the same direction, sense, and length. An arrow representing a vector has a tail
and a tip. From the (ro ugh) definition a bove, we deduce that in order to represent (if yo u
want, to draw) a given vector as an arrow, it is necessary and sufficient to prescribe its tail.
a a
a
b
bb
c
c
a
P
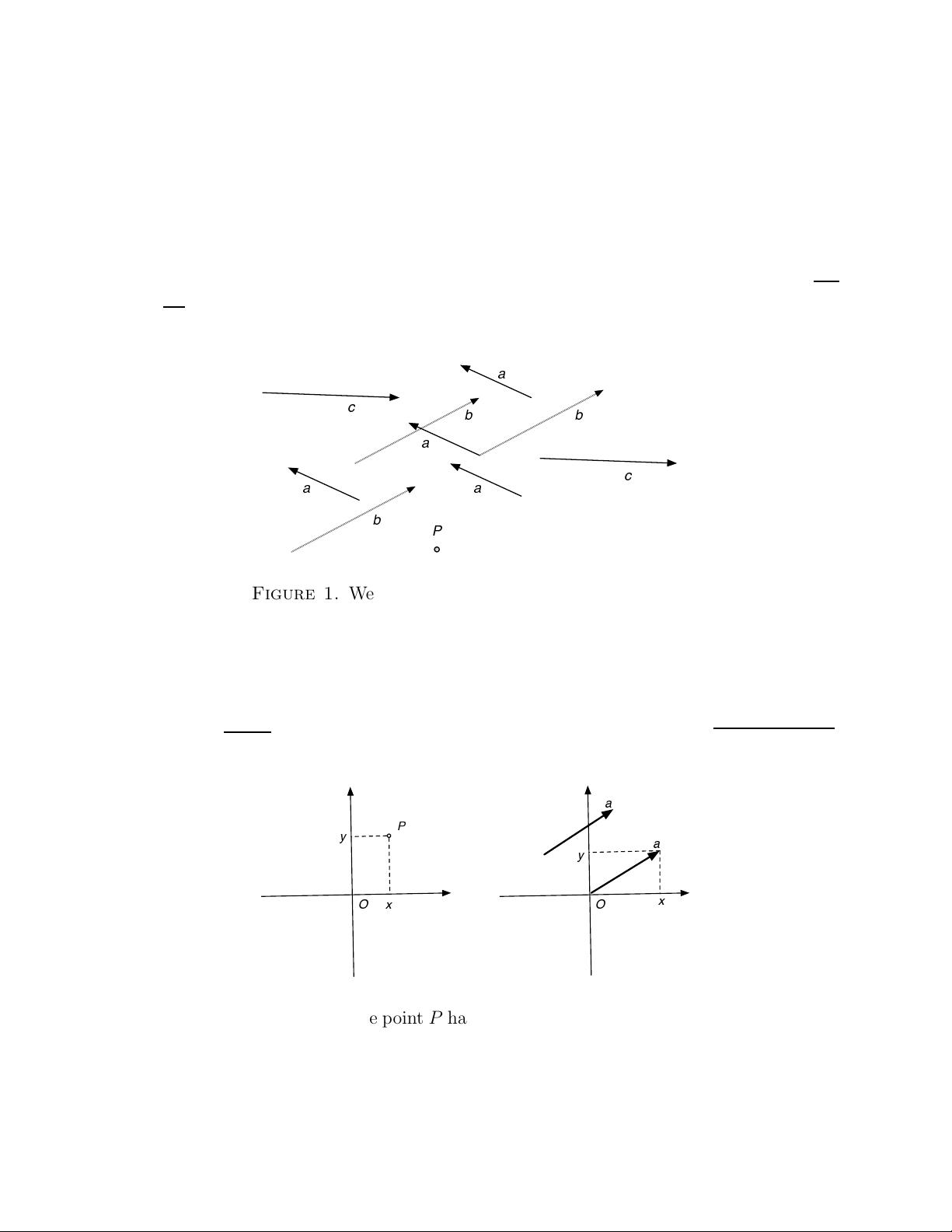
Figure 1. We see four copies of the vector a, three of
the vector b, and two of the vector c. We a lso see a point
P .
An important instrument in handling points, vectors, and (consequently) many other
geometric objects is the Cartesian coordinate system in the plane. This consists of a point
O, called the origin, and two perpendicular lines going through O, called coordinate axes.
Each line has a positive direction, indicated by an arrow (see Figure 2). We denote by R the
O O
P
x
y
x
y
a
a
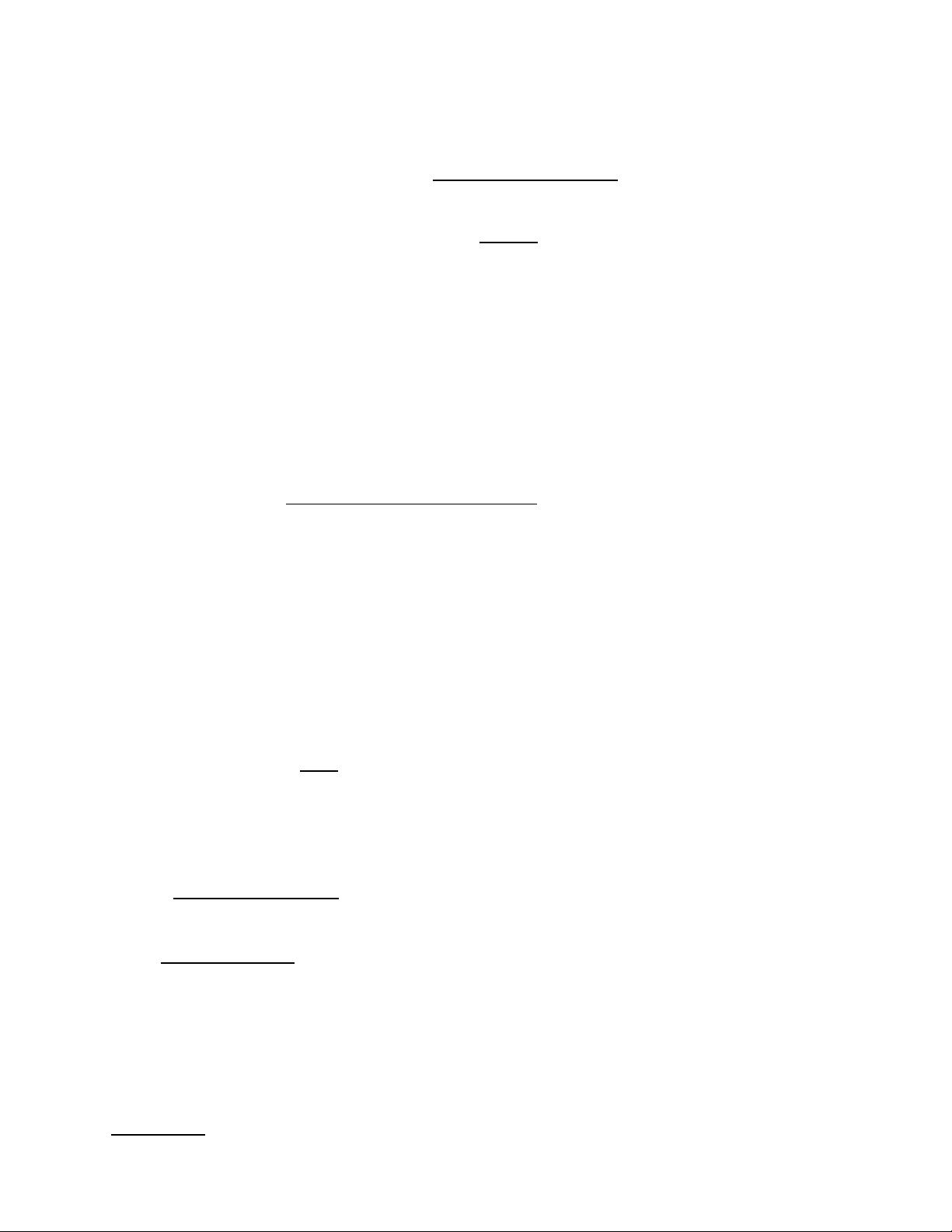
Figure 2. The point P has coordinates x, y. The vector
a has also coordinates x, y.
set of all real numbers and by R
2
the set of all pairs of numbers, of the form (x, y) , where
x, y are in R. Points are identified with elements R
2
, as follows: to each point P corresponds
the pair (x, y) consisting of the coordinates of the projections of P on the two axes. We say
that P has coordinates (x, y). Also vectors a re identified with elements of R
2
, as follows: if
1
剩余19页未读,继续阅读

weixin_43102907
- 粉丝: 0
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- zigbee-cluster-library-specification
- JSBSim Reference Manual
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0