一维弹塑性本构编程入门
需积分: 36 53 浏览量
更新于2023-05-22
3
收藏 250KB PDF 举报
一维弹塑性本构程序入门,包括公式推导,和伪代码给出,涉及到牛顿拉弗逊迭代,几种硬化模型,我觉得对写uamt来说帮助非常大,虽然说这个不是umat教程,但是绝对值得一看,非常棒的入门手册,新手入门很容易,

1
Nonlinear Static - 1D Plasticity - Various Forms of Isotropic Hardening
by Louie L. Yaw
Walla Walla University
Draft Date January 25, 2012
key words: plasticity, algorithms, nonlinear analysis, isotropic hardening, algorithmic tan-
gent modulus, elasto-plastic tangent modulus, Kuhn-Tucker conditions, consistency param-
eter, internal hardening variable, equivalent plastic strain, flow rule, consistency condition,
yield condition
1 Introduction
Metals loaded beyond the elastic limit deform plastically. It is often the goal in structural
mechanics to model plastic deformations of such metals in a computational setting. Creating
algorithms to model the combined effect of elastic and plastic deformations is not trivial.
However, plasticity for the one dimensional case is a good introduction to the concepts
necessary to construct such algorithms. Hence, this article presents plasticity from a one
dimensional point of view and derives algorithms for a variety of different ha r d en i n g models.
It is the g oal of this article to introduce students to algorithmic plasticity (nonlinear material)
models and also pave the way for future learning in the area of three dimensional plasticity.
One dimensional plasticity is hel p fu l as an introduction and as an intermediate step to-
ward more difficult topics, but it is also practical for bar elem ents often modeled in structural
analysis software. It is therefore worth noting that the information learn ed herein i s useful
for the implementation of plasticity by modifying a standar d linear truss analysis program.
Only small strains are considered.
2 Elastic and plastic behavior
Material testing is often accomplished by tensile tests. Plots of stress versus strain are often
created from tension tests. For many materials the plot of stress versus strain is linear for
stresses below a certain threshold called the yield stress. If the material is loaded beyond this
point the material yields and begins to deform plastically. How the material deforms after
passing t h e yield point varies from material to material. For instance many materials exhibit
hardening after reaching the yield limit. This hardening is exhibited by increasing resistance
to load after yielding, but th i s increase in resistance is much less than the resistance provided
by the material before yi el d i n g .
If hardening is present the post yield behavior exhibits both increasing elastic strain and
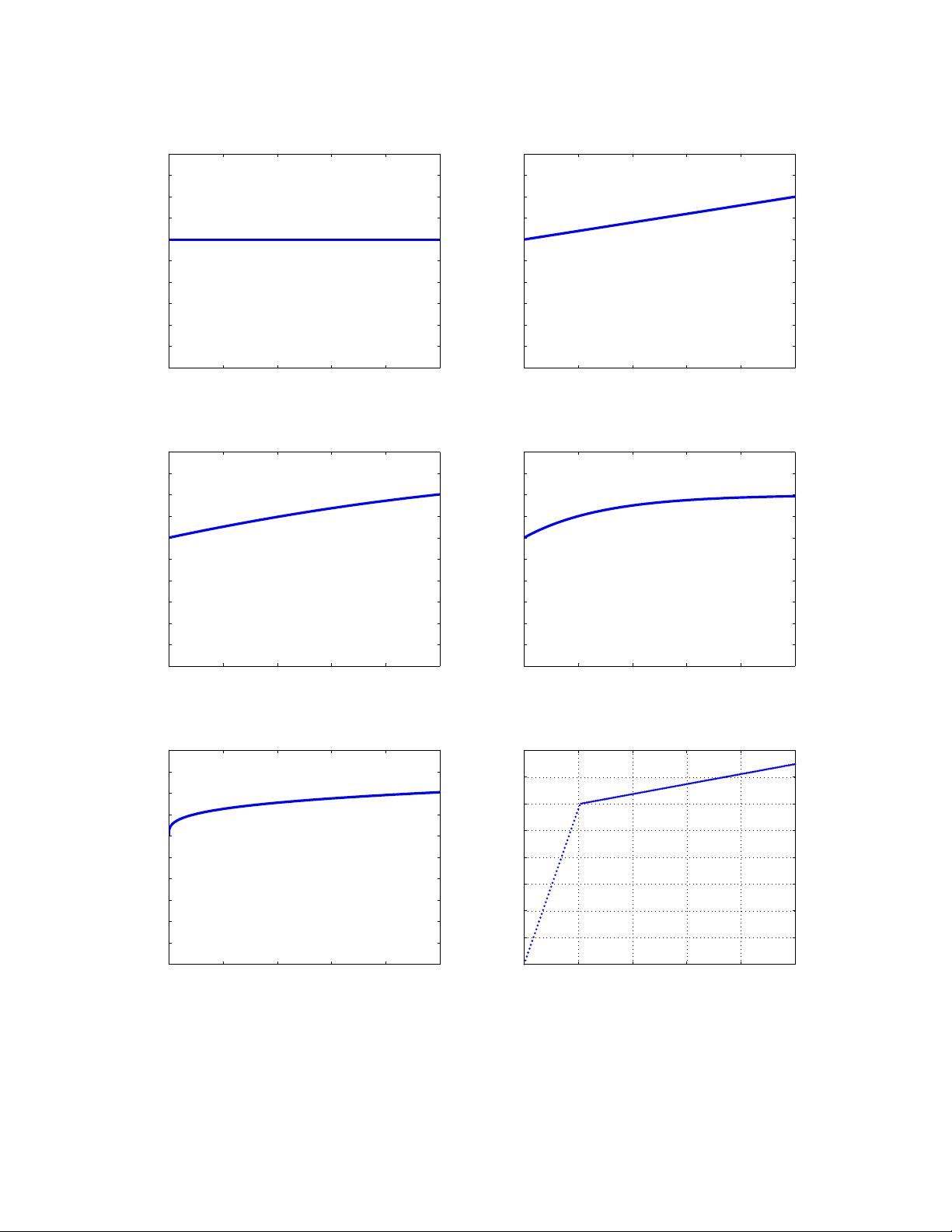
increasing plastic strain. A variety of models are availab l e to try and s imulate how the
plastic strain increases with increasing stress. The post yield behavior is often modeled
by specifying how the yield stress evolves with increasing plastic strain. A variety of such
models are shown in Figure 1. In the plots the yield point is shown, σ
y
= 30 ksi, a n d the
hardening behavior is plotted based on the formulas sh own. It is important to note that the
plots are of stress versus plastic strain. When plots of stress versus total strain a re created


剩余24页未读,继续阅读

qq_15272621
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- DeepFreeze密码移除工具6.x版本使用教程
- MQ2烟雾传感器无线报警器项目解析
- Android实现消息推送技术:WebSocket的运用解析
- 利用jQuery插件自定义制作酷似Flash的广告横幅通栏
- 自定义滚动时间选择器,轻松转换为Jar包
- Python环境下pyuvs-rt模块的使用与应用
- DLL文件导出函数查看器 - 查看DLL函数名称
- Laravel框架深度解析:开发者的创造力与学习资源
- 实现滚动屏幕背景固定,提升网页高端视觉效果
- 遗传算法解决0-1背包问题
- 必备nagios插件压缩包:实现监控的关键
- Asp.Net2.0 Data Tutorial全集深度解析
- Flutter文本分割插件flutter_break_iterator入门与实践
- GD Spi Flash存储器的详细技术手册
- 深入解析MyBatis PageHelper分页插件的使用与原理
- DELPHI实现斗地主游戏设计及半成品源码分析
