

9
ARM7 芯片软件的运行完全是由上述的这些寄存器决定的 , 只要能合理的修改这些寄存
器就能控制软件的运行 , 操作系统就是通过备份 、 还原 、 更改这些寄存器来控制程序执行流
程的,进而实现任务之间的切换。由于 C 语言无法访问到这些寄存器,因此必须使用汇编
语言才能对这些寄存器进行操作,下节我们将了解一些 ARM7 的汇编语言,以便理解操作
系统的任务切换过程。
第 2 节 ARM7 汇编语言简介
ARM7 芯片有 2 种汇编语言指令集,一种叫做 ARM 指令集,字长为 32bits ,另一种 叫
THUMB 指令集 , 字长为 16bits 。 这两种指令集各有优缺点 , 它们可以单独使用也可以混合
在一起使用,在 ARM7 芯片上,我们将只使用 ARM 指令集,在后续的 Cortex 芯片上我们
将使用 THUMB 指令集的改良版 —— THUMB2 指令集。
本小节只介绍本操作系统中使用到的一些汇编语言 , 对它们的介绍也仅限于本操作系统
使用到的部分用法,并非全面,更详细的信息请读者自行查阅附录中的参考文档 2 。
另外我再补充一下我观点 , 以前看到一些同学说在学习芯片 , 请教如何使用汇编语言编
程 , 总是抠这方面的问题 。 我觉得如果我们学习芯片的目的只是做开发项目 , 那么就没有必
要学习汇编语言 , 可以把更多的精力放在学习芯片的功能特性上 。 一个完备的芯片产品甚至
不需要底层软件工程师了解太多的芯片硬件外设特性,有封装好的驱动库函数可以直接调
用 。 这次如果不是编写操作系统 , 我对汇编语言也仅仅是了解一点 。 汇编语言了解一点即可 ,
,
在某些极少数情况下可能会使用到汇编语言定位问题,但这也是极少的情况。
在操作系统中我们使用了下面几条指令:
� MOV/MOVS
MOV 是英文单词 Move 的缩写 , “ 搬移 ” 的意思,将数据搬移进寄存器,指令格式为 :
MOV 目的寄存器 , 源寄存器
MO V 指令将源寄存器中的数据搬移到目的寄存器中 , 寄存器间数据搬移可以使 用 MO V
指令,如:
MOV R 0 , R1
MOV R14, PC
意为:
R0 = R1
R14 = PC + 8
注意, ARM7 有两级流水线,如果读取 PC 寄存器的话,就会多读取 2 条指令的长度
,
也就是 8 个字节,目的寄存器为 PC+8 。
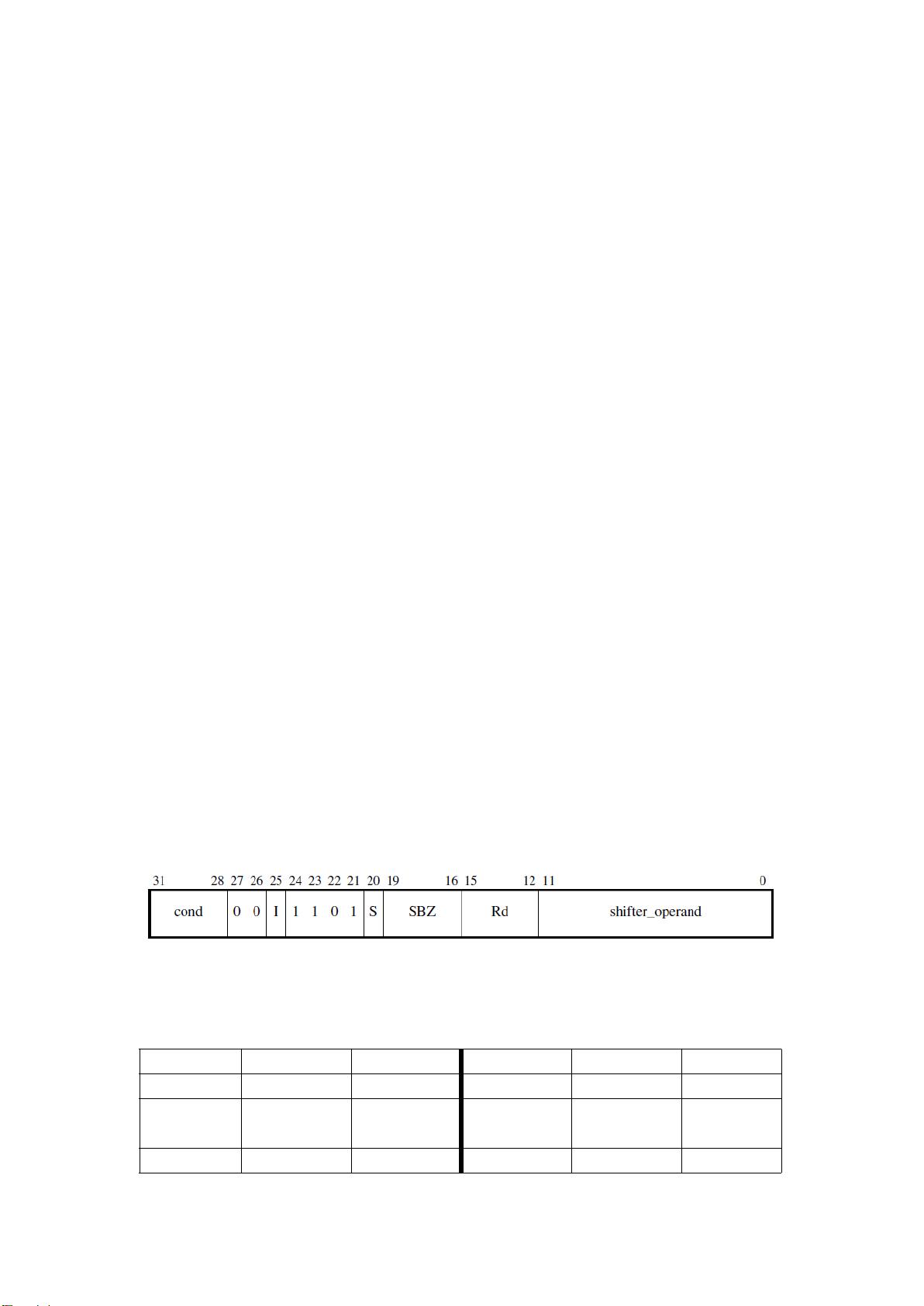
MOVS 指令与 MOV 指令的格式 、 功能是一样的 , 除此之外 , 如果目的寄存器是 PC 的
话 , MOVS 会将当前模式下的 SPSR 写入到 CPSR 中 。 本操作系统从 SVC 模式返回 USR 模
式时就需要使用 MOVS 指令恢复 USR 模式的 CPSR 。例如,在中断模式下有下面的指令:
MOVS PC, R14
意为:
CPSR = SPSR


剩余193页未读,继续阅读

WangChao1227
- 粉丝: 2
- 资源: 3
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 图书馆管理系统数据库设计与功能详解
- ***物流有限公司仓储配送业务SOP详解
- 机械专业实习经验与学习收获
- 阎良区生活垃圾卫生填埋场施工与运营管理详解
- 濮阳市生活垃圾无害化处理工程施工组织设计详解
- MATLAB均匀平面波仿真课程设计指南
- 北京市地铁9号线技术规格与设备详情
- 西门子PLC在中央空调自动控制系统的应用
- PLC驱动的电梯控制系统发展历程与未来趋势
- 外墙维修工程政府采购项目施工方案概述
- 项目方案委员会会议全程指南与文件清单
- Dreamweaver实战:创建简单网页与站点管理
- 国内升学与就业政策及信息搜集指南
- 国资公司2020上半年创新发展与资产管理工作总结
- 项目管理:目标控制与各方角色分工详解
- 构建项目管理体系:提升组织绩效的关键
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


