HTC vive开发日记
需积分: 29 38 浏览量
更新于2023-05-25
收藏 1.39MB DOCX 举报
HTC vive的开发日记,介绍VR产品设备的交互操作,VR开发的基础说明文档,适合初学者学习
HTC Vive 之 Unity3d 开发日记@1
这一篇算是一个中级教学我从中学到了不少知识但是缺乏对代码的深度解析
而这个将是我接下来要做的当然我希望阁下可以抽时间对这些资源进行深入
的理解这将有利于我们之后可以一起来探讨
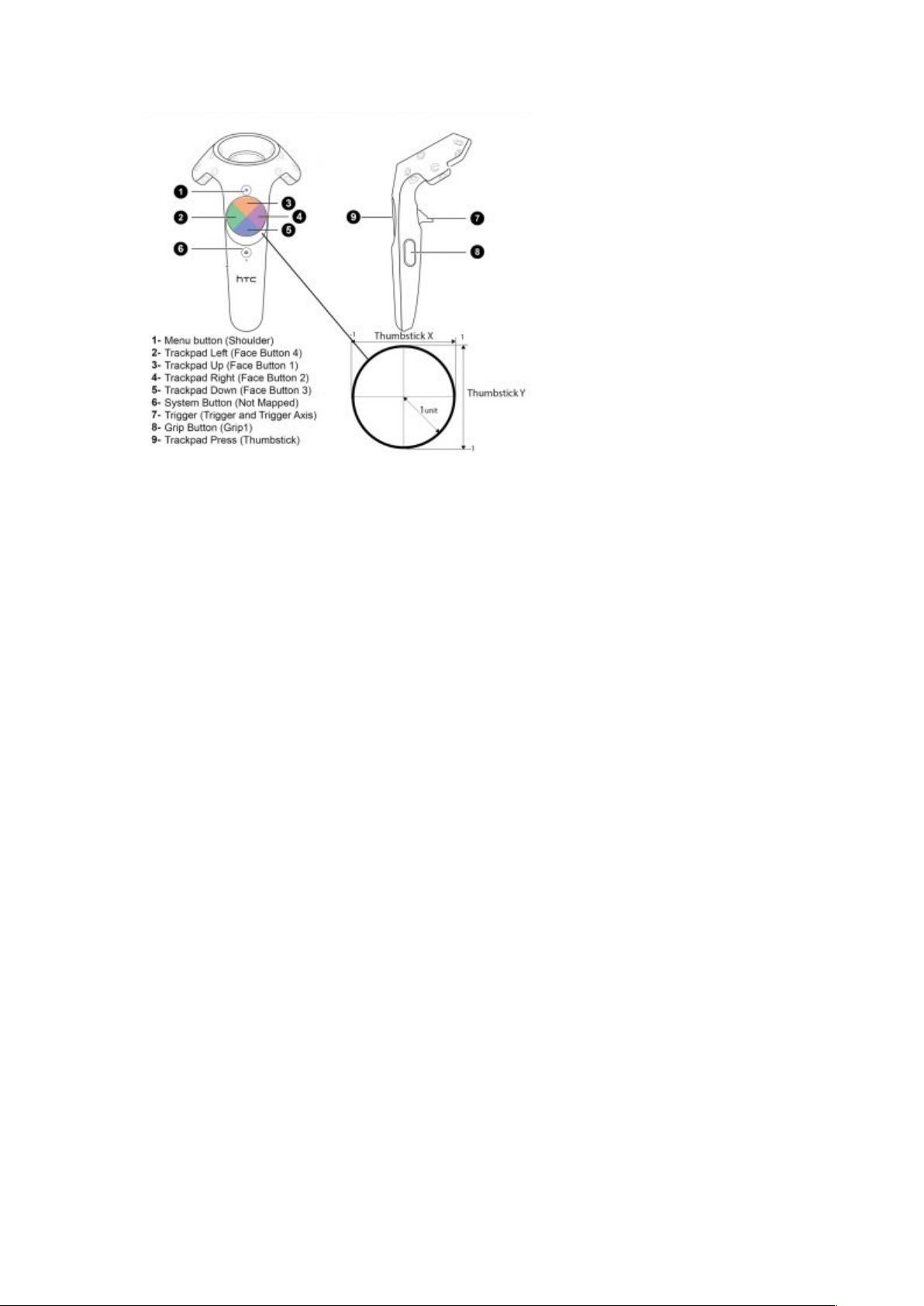
如图我们要实现的是通过代码来实现对手柄的全面掌控重点在于交互至于如
何开发一款 游戏是在实现交互以后需要探讨的事情我们一步一个脚印来探
索
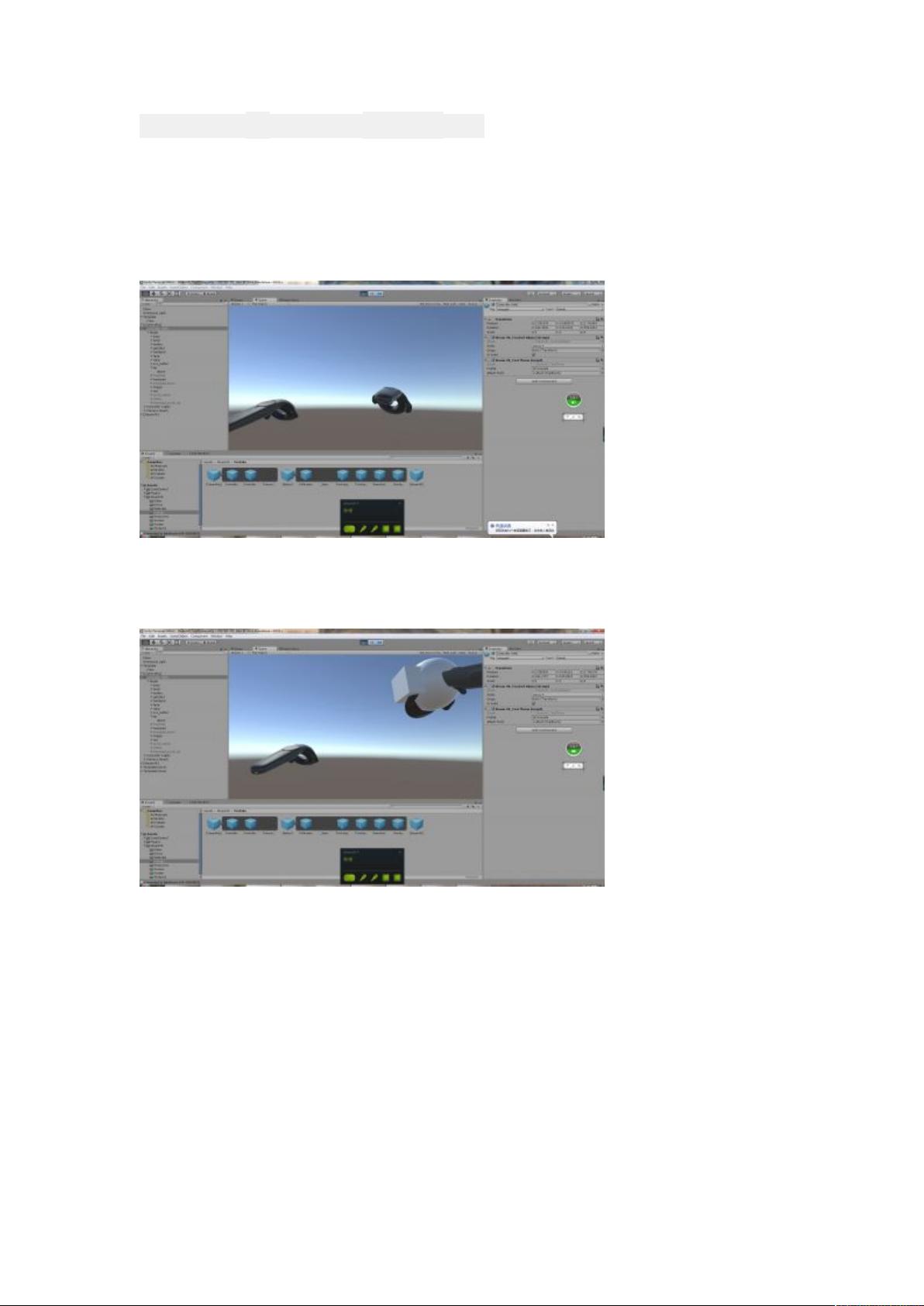
第一步如图我们已经导入了 下面的 绿色图标表
明 的硬件也已经准备就绪这是 场景也是我
们展开分析的入手点这个测试很简单就是你按下 的时候手柄上会实
例化一个圆球 的结合体当然松开 的时候这个结合体就会脱离
手柄当然你还可以施加一个扔的动作这样的话结合体会有一个对应的加速度



剩余63页未读,继续阅读
2022-08-08 上传
2022-03-09 上传
2018-10-14 上传
2016-07-11 上传
2022-06-24 上传

AAAAA星
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 彩虹rain bow point鼠标指针压缩包使用指南
- C#开发的C++作业自动批改系统
- Java实战项目:城市公交查询系统及部署教程
- 深入掌握Spring Boot基础技巧与实践
- 基于SSM+Mysql的校园通讯录信息管理系统毕业设计源码
- 精选简历模板分享:简约大气,适用于应届生与在校生
- 个性化Windows桌面:自制图标大全指南
- 51单片机超声波测距项目源码解析
- 掌握SpringBoot实战:深度学习笔记解析
- 掌握Java基础语法的关键知识点
- SSM+mysql邮件管理系统毕业设计源码免费下载
- wkhtmltox下载困难?找到正确的安装包攻略
- Python全栈开发项目资源包 - 功能复刻与开发支持
- 即时消息分发系统架构设计:以tio为基础
- 基于SSM框架和MySQL的在线书城项目源码
- 认知OFDM技术在802.11标准中的项目实践
