使用OmniThreadLib进行并行编程
"平行编程与OmniThreadLib的使用"
在Delphi XE环境下进行并行程序开发时,OmniThreadLibrary是一个非常有用的开源库。这个库由其作者精心设计,旨在简化多线程编程,提高应用程序的性能和响应性。本文将深入探讨多线程编程的基础知识,并介绍如何利用OmniThreadLibrary来实现这一目标。
首先,让我们理解什么是多线程编程。多线程是指在一个进程中同时执行多个线程,每个线程都拥有自己的CPU状态、栈空间和局部变量。这使得程序可以在不同的任务之间并发执行,从而提高计算机资源的利用率。当一个程序启动时,操作系统会创建一个进程,这个进程中包含程序的基本信息,如内存分配、打开的文件和窗口句柄等。但CPU的状态信息是属于线程的,最初只有一个主线程与进程一起被创建。
现代操作系统支持在同一进程中执行多个执行线程,通过在代码中创建额外的后台线程来实现这一点。这使得程序能够并行处理任务,比如在用户界面更新的同时进行数据处理,提供更好的用户体验。
OmniThreadLibrary就是为了解决这些问题而诞生的。它为Delphi开发者提供了一套简单易用的API,用于创建、管理和同步线程。库中的类和组件可以帮助我们创建线程池、实现任务调度、处理线程间的通信和同步,以及处理线程异常和错误。
例如,使用OmniThreadLibrary可以轻松创建一个新的工作线程:
```delphi
uses
OTL.threads;
var
WorkerThread: TOmniWorker;
begin
WorkerThread := TOmniWorker.Create(procedure
var
Data: Integer;
begin
// 在这里执行你的线程任务
Data := ComputeExpensiveResult();
// 可以使用WorkerThread的事件或方法来与主线程通信
WorkerThread.Message.Data := Data;
end);
WorkerThread.OnTerminate := WorkerTerminated;
WorkerThread.Start;
end;
procedure WorkerTerminated(Sender: TObject);
begin
// 处理线程结束后的逻辑
end;
```
在这个例子中,`TOmniWorker`类代表一个工作线程,`ComputeExpensiveResult()`是你在新线程中执行的计算操作。`OnTerminate`事件则允许你在主线程中处理线程完成后的逻辑。
此外,OmniThreadLibrary还提供了诸如`TOmniThreadPool`这样的类,用于管理一组可重用的工作线程,这样可以高效地处理大量并发任务。还有`TOmniBlockingCollection`用于线程安全的数据传递,以及`TOmniTask`用于异步任务和回调。
掌握多线程编程以及使用OmniThreadLibrary可以帮助你编写出更加高效、响应更快的Delphi应用程序。通过学习和实践,你可以充分利用现代多核处理器的能力,提升软件的性能,同时降低程序的复杂性和维护成本。

2. Introduction to OmniThreadLibrary
2018/5/24
http://www.omnithreadlibrary.com/book/chap05.html
第 15 页 共 213 页
14
[GetCurrentThreadID, msg.MsgData.AsString]));
15
end
)
16
.OnTerminated(
17
procedure
18
beg
i
n
19
Task.Comm.Send(WM_LOG, Format('[%d] Future terminated, result = %d',
20
[GetCurrentThreadID, FCalc.Value]));
21
FCalc :=
n
il
;
22
Task.Comm.Send(WM_LOG, Format('[%d] Terminating worker',
23
[GetCurrentThreadID]));
24
// Terminate TWorker
25
Task.Terminate;
26
end));
27
end;
28
end
;
This code executes in a background worker thread. It may look complicated, however, the
code simply creates a Future calculation (FCalc := Parallel.Future<integer>) and sets up event
handlers that will process messages sent from the future (.OnMessage) and handle the
completion of the future calculation (.OnTerminated).
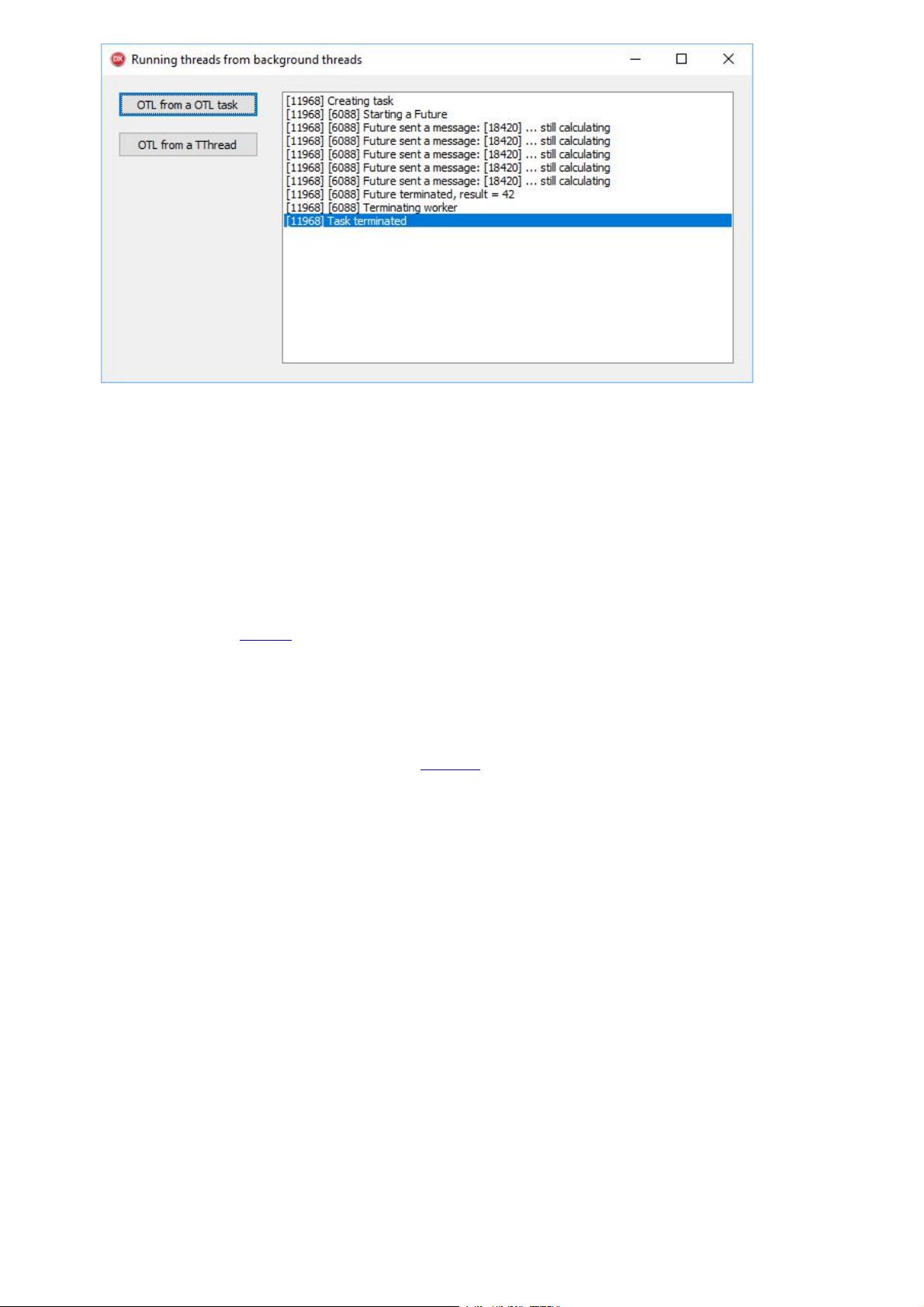
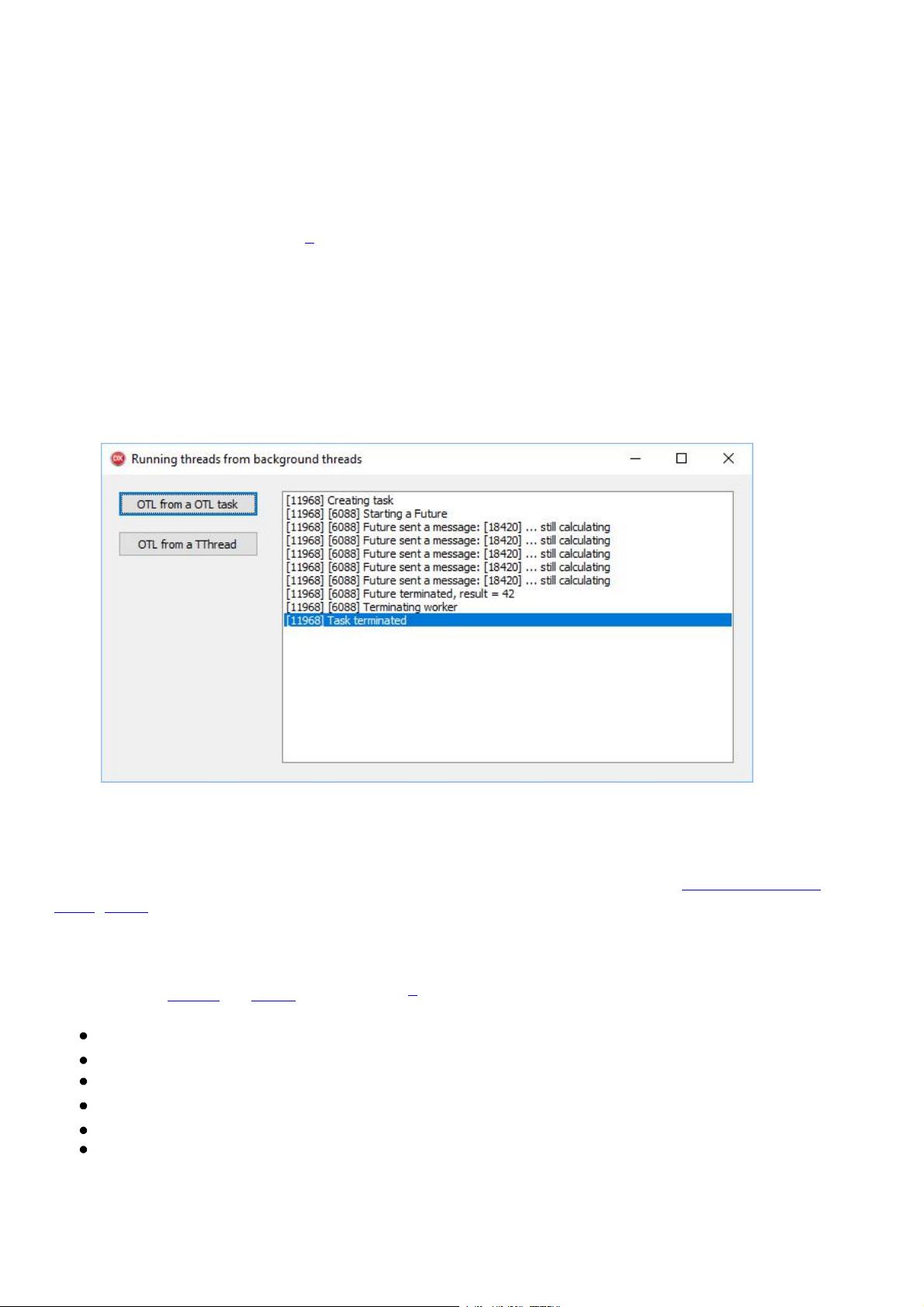
OnMessage just takes message that was sent from the future, adds some text and current
thread ID and forwards message to the form where it is logged in the WMLog method (not
shown here).
OnTerminated also logs the event, clears the future interface and terminates self (Task.Terminate).
After that, form’s TaskTerminated method (not shown here) is called and cleans the task
controller interface.
The future itself does nothing special, it just sends five messages with one second delay
between them and then returns a value.
1
f
un
c
t
i
on
T
W
o
r
k
e
r
.Asy_DoTheCalculation(
c
on
s
t
task: IOmniTask): integer;
2
var
3
i: integer;
4
beg
i
n
5
f
o
r
i := 1
t
o
5
do beg
i
n
6
task.Comm.Send(MSG_STATUS, Format('[%d] ... still calculating',
7
[GetCurrentThreadID]));
8 Sleep(1000);
9
end;
10
Result := 42;
11
end;
When you run the program and click on the button, following text will be displayed (thread
IDs – numbers in brackets – will be different in your case, of course).


剩余212页未读,继续阅读
2018-10-16 上传
2013-08-27 上传
228 浏览量
2016-05-28 上传
2013-10-03 上传
2010-12-21 上传
2013-10-03 上传
2018-05-05 上传

sonadorje
- 粉丝: 27
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- CoreOS部署神器:configdrive_creator脚本详解
- 探索CCR-Studio.github.io: JavaScript的前沿实践平台
- RapidMatter:Web企业架构设计即服务应用平台
- 电影数据整合:ETL过程与数据库加载实现
- R语言文本分析工作坊资源库详细介绍
- QML小程序实现风车旋转动画教程
- Magento小部件字段验证扩展功能实现
- Flutter入门项目:my_stock应用程序开发指南
- React项目引导:快速构建、测试与部署
- 利用物联网智能技术提升设备安全
- 软件工程师校招笔试题-编程面试大学完整学习计划
- Node.js跨平台JavaScript运行时环境介绍
- 使用护照js和Google Outh的身份验证器教程
- PHP基础教程:掌握PHP编程语言
- Wheel:Vim/Neovim高效缓冲区管理与导航插件
- 在英特尔NUC5i5RYK上安装并优化Kodi运行环境
